步进电机基本原理 电机将电能转换成机械能,步进电机将电脉冲转换成特定的旋转运动
每个脉冲所产生的运动是精确的,并可重复,这就是步进电机为什么在定位应用中如此有效的原因
永磁步进电机包括一个永磁转子、线圈绕组和导磁定子
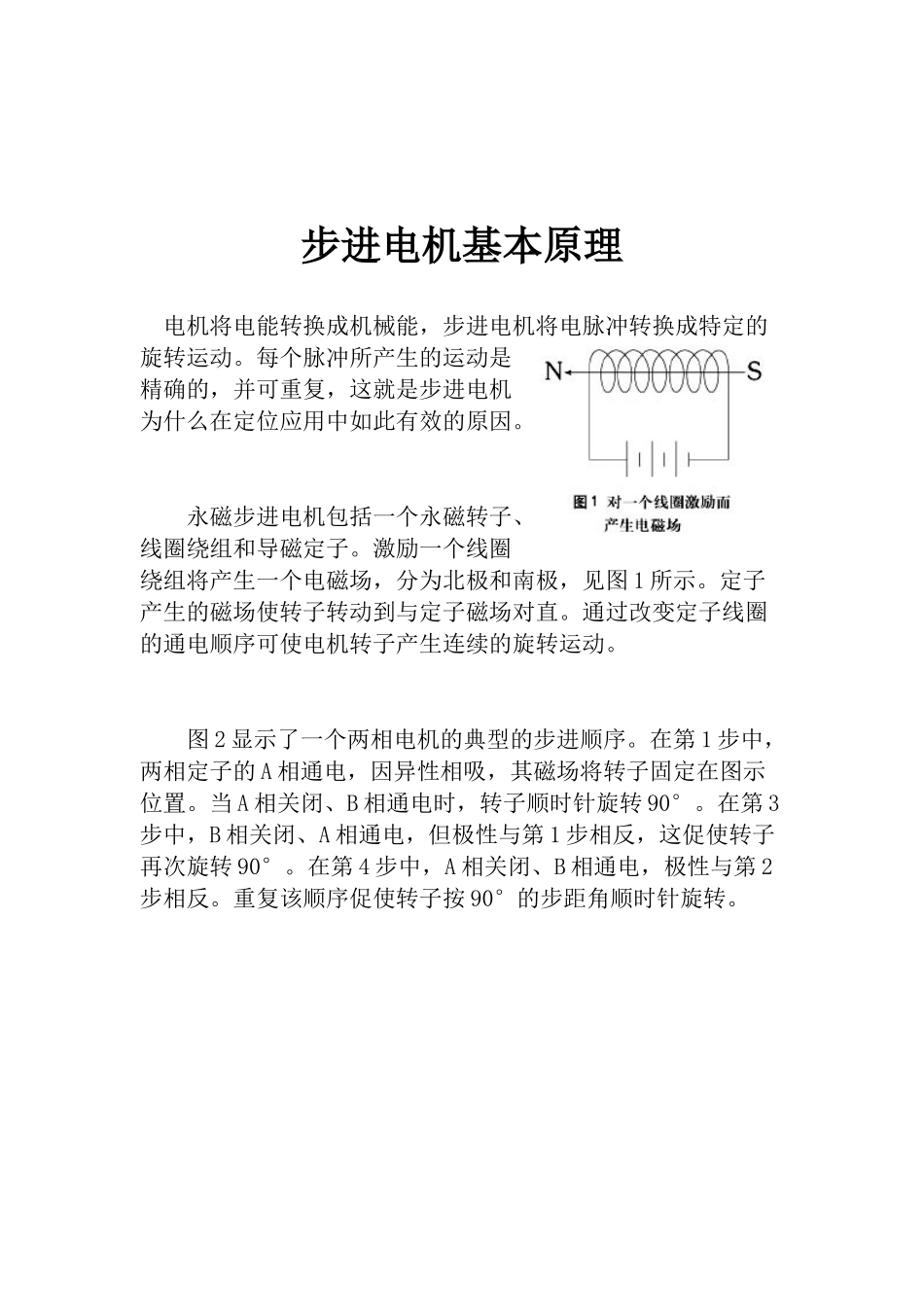
激励一个线圈绕组将产生一个电磁场,分为北极和南极,见图 1 所示
定子产生的磁场使转子转动到与定子磁场对直
通过改变定子线圈的通电顺序可使电机转子产生连续的旋转运动
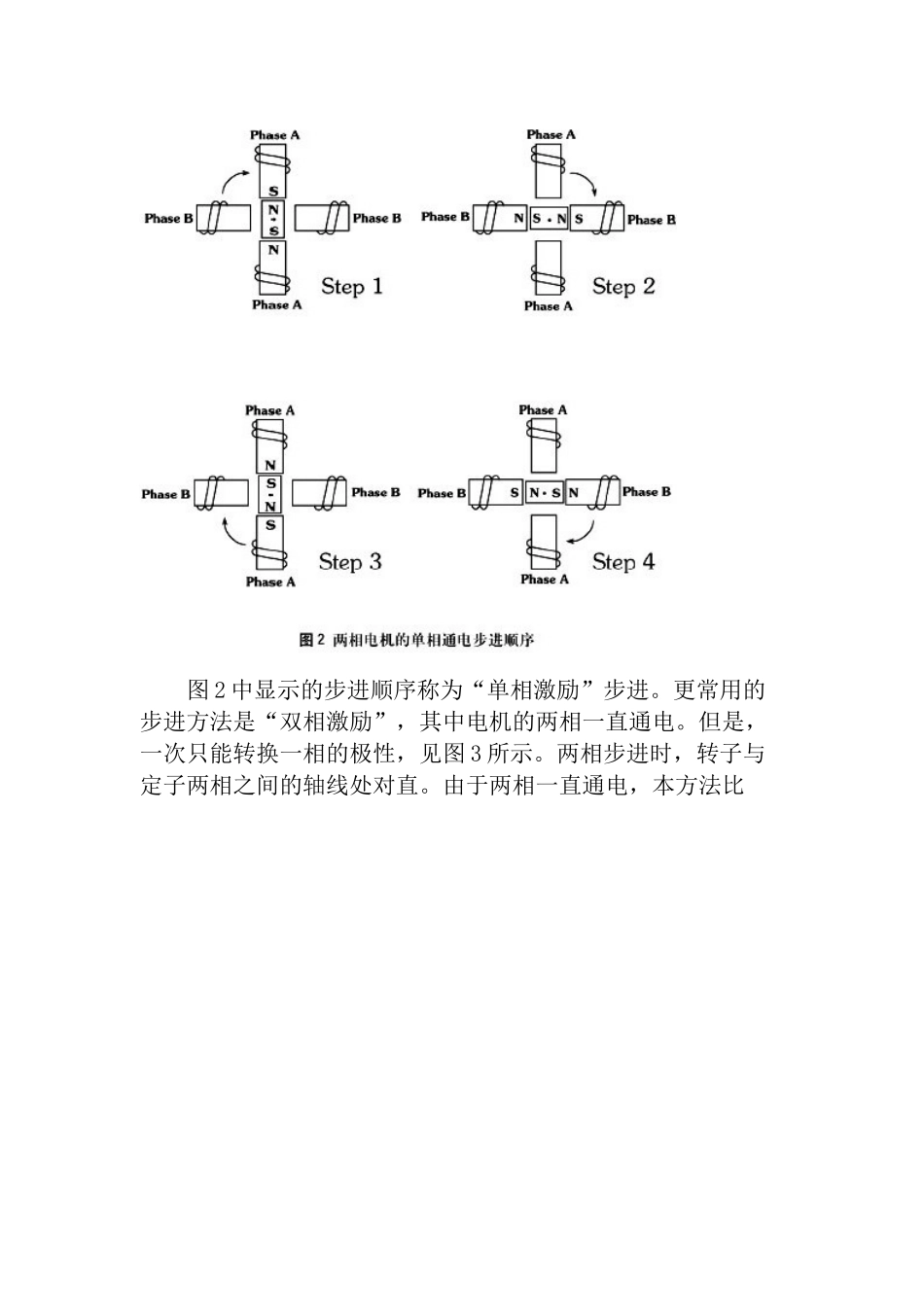
图 2 显示了一个两相电机的典型的步进顺序
在第 1 步中,两相定子的 A 相通电,因异性相吸,其磁场将转子固定在图示位置
当 A 相关闭、B 相通电时,转子顺时针旋转 90°
在第 3步中,B 相关闭、A 相通电,但极性与第 1 步相反,这促使转子再次旋转 90°
在第 4 步中,A 相关闭、B 相通电,极性与第 2步相反
重复该顺序促使转子按 90°的步距角顺时针旋转
图 2 中显示的步进顺序称为“单相激励”步进
更常用的步进方法是“双相激励”,其中电机的两相一直通电
但是,一次只能转换一相的极性,见图 3 所示
两相步进时,转子与定子两相之间的轴线处对直
由于两相一直通电,本方法比“单相通电”步进多提供了 41
1%的力矩,但输入功率却为 2 倍
半步步进 电机也可在转换相位之间插入一个关闭状态而走“半步”
这将步进电机的整个步距角一分为二
例如,一个 90°的步进电机将每半步移动 45°,见图 4
但是,与“两相通电”相比,半步进通常导致 15%~30%的力矩损失(取决于步进速率)
在每交换半步的过程中,由于其中一个绕组没有通电,所以作用在转子上的电磁力要小,造成了力矩的净损失
双极性绕组 双相激励介绍了利用一种“双极性线圈绕组”的方法
每相用一个绕组,通过将绕组中电流反向,电磁极性被反向
典型的两相双极驱动的输出步骤在电气原理图和图 5 中的步进顺序中进一步阐述
按图所示,转换只利