机械创新设计说明书设计名称:爬杆机器人的设计设 计 人:姜鸿学号: 110611010 班级: 11 机制本一班井冈山大学机电学院2013/11/23 第一章背景概述蠕行式仿生变直径杆爬行机器人的研究报告现代生活中,高空作业不断增加,如路灯杆、悬索桥索、杆状城市建筑的清洗、油漆、喷涂料、检查、维护、电力系统架设电缆、瓷瓶清洁等
目前的清洗、维护工作主要由人工和大型设备来完成,但它们都集中表现出效率低、劳动强度大、耗能高、二次污染严重等问题
市场上少量使用的气动蠕行式爬行器,其上升和下降运动的实现由气压控制,需要气源和气动控制系统,能量损耗大,并且一般伴有较大的噪声
因为连接了大量的支持设备, 气动蠕行爬行器的体积和活动范围都受到限制,而且设备成本较高
第二章运动原理—仿生设计在设计移动机器人系统时, 首先应考虑机器人的用途, 因为不同的用途,移动机器人的移动机构是不同的
~ J'l-,还应考虑机器人的工作环境、耐久性、稳定性、机动性、可控性、复杂性、外型尺寸及制作费用等
作为杆件爬行机器人,根据现有的技术方案,有很多种移动方式可供选择
各种移动方案的比较见表1所示
表1 爬行机器人移动方案的比较移动方式优点缺点轮式运动速度快, 控制方便, 转弯容易
接触面积小,越障能力差,易打滑
履带式接触面积大, 承载能力强, 移履带磨损大,结构复杂机动动速度快
磁吸式承载能力大, 具有很强的适应能力
越障能力差应,运动用范围窄
蠕动式承载能力大, 运动平稳, 控制简便,适应能力强
运动速度慢,结构复杂
我们所要设计的这种爬行机器人, 它的工作对象为各种型号的城市杆状建筑, 要求承载能力大、 接触面积小、 速度适中,适应能力强,能越障碍物
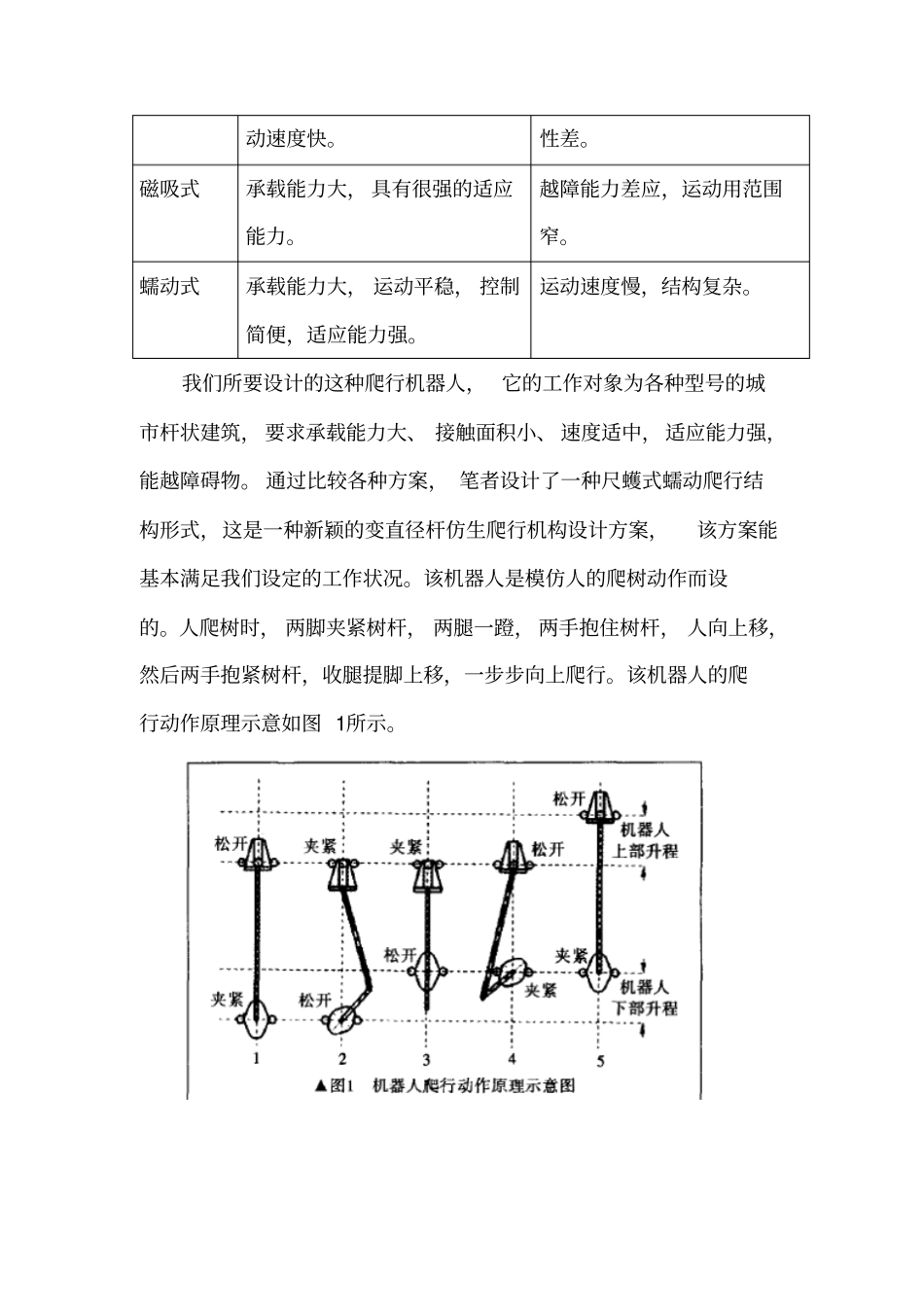
通过比较各种方案, 笔者设计了一种尺蠖式蠕动爬行结构形式,这是一种新颖的变直径杆仿生爬行机构设计方案,该方案能基本满足我们设定