Wuhan Polytechnic University Industrial &Commercial College 本科毕业论文(设计)论 文 题 目:商店迎宾机器人电路设计姓名:...
FANUC 机器人操作说明书下载后可任意编辑1. 概要 ………………………………………………………………… 32. 坐标系 …………………...
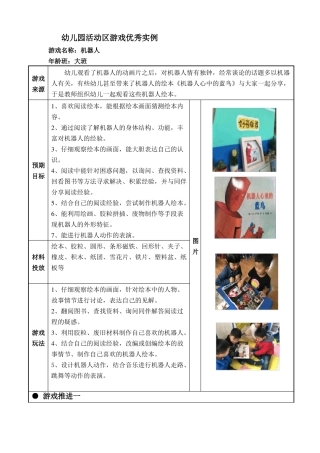
幼儿园活动区游戏优秀实例游戏名称:机器人年龄班:大班游戏来源幼儿观看了机器人的动画片之后,对机器人情有独钟,经常谈论的话题多以机器...
工业机械臂-ROS 操作系统-机器人操作系统实验室建设方案目录1工业机械臂-ROS 操作系统-机器人操作系统实验室..............................
[课程] 《工业机器人技术》课程标准1 课程概述课程名称:工业机器人技术课程性质:专业核心课参考学时:56 学时参考学分:学分开设时间...

工业机器人技术题库及答案一、判断题第一章1、 工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成。√2、 被誉为“工业机器人...

码垛程序一般常见语言说明SPEED/SP 速度 ALWAYS指定下一条动作命令的运动速度,若追加 ALWAYS则此命令指定的速度值将持续到执行下一条...
上海奥特博格汽车工程有限公司http://www.shautobox.com下载后可任意编辑目录第一章:设备指示灯、按钮开关说明…………………………………...
武汉科技大学本科毕业设计111Equation Chapter 1 Section 1摘 要Delta 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、精...
下载后可任意编辑中国海洋大学工程学院机械电子工程讨论生课程考核论文题目: AUV 水下机器人运动控制系统讨论报告 课程名称: 运动控...

下载后可任意编辑作图步骤:1、双击桌面 ROBOTSTUDIO 5.15 图标,如下图所示。点击左侧选项栏,选择授权。然后选择激活向导,选择如下:...
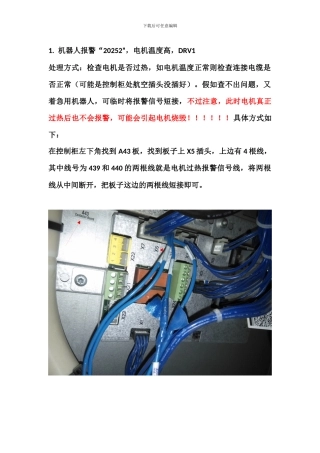
下载后可任意编辑1. 机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是...
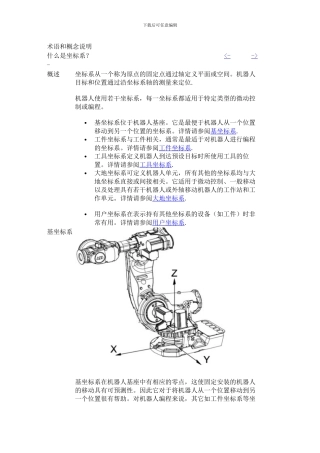
下载后可任意编辑术语和概念说明什么是坐标系?<-->- 概述坐标系从一个称为原点的固定点通过轴定义平面或空间。机器人目标和位置通过沿坐...
下载后可任意编辑RAPID 程序指台与功能 ABB 机器人提供了丰富的 RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提...

下载后可任意编辑 技术参考手册RAPID语言概览下载后可任意编辑 Trace back information:Workspace R15-2 version a20Checked in 2...
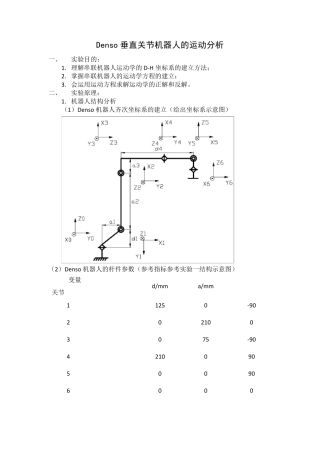
Denso 垂直关节机器人的运动分析 一、 实验目的: 1. 理解串联机器人运动学的 D-H 坐标系的建立方法; 2. 掌握串联机器人的运动学...
comau机器人

CDS5500机器人舵机用户手册

1.示教器外观图机器人将进入急停状态(图示 2)D・SHBB・・^-□■□0 巳曰 00HzE 曰■■■-0...-*»<"・QQsansDBOODa□gBUBBDP"发那科...

AS0V2.4新松工业机器人通用安装手册