控制系统的极点配置设计法一、极点配置原理1
性能指标要求2
极点选择区域主导极点:2111costan图 3
22 系统在 S 平面上满足时域性能指标的范围nst4;当Δ= 0
nst3当Δ= 0
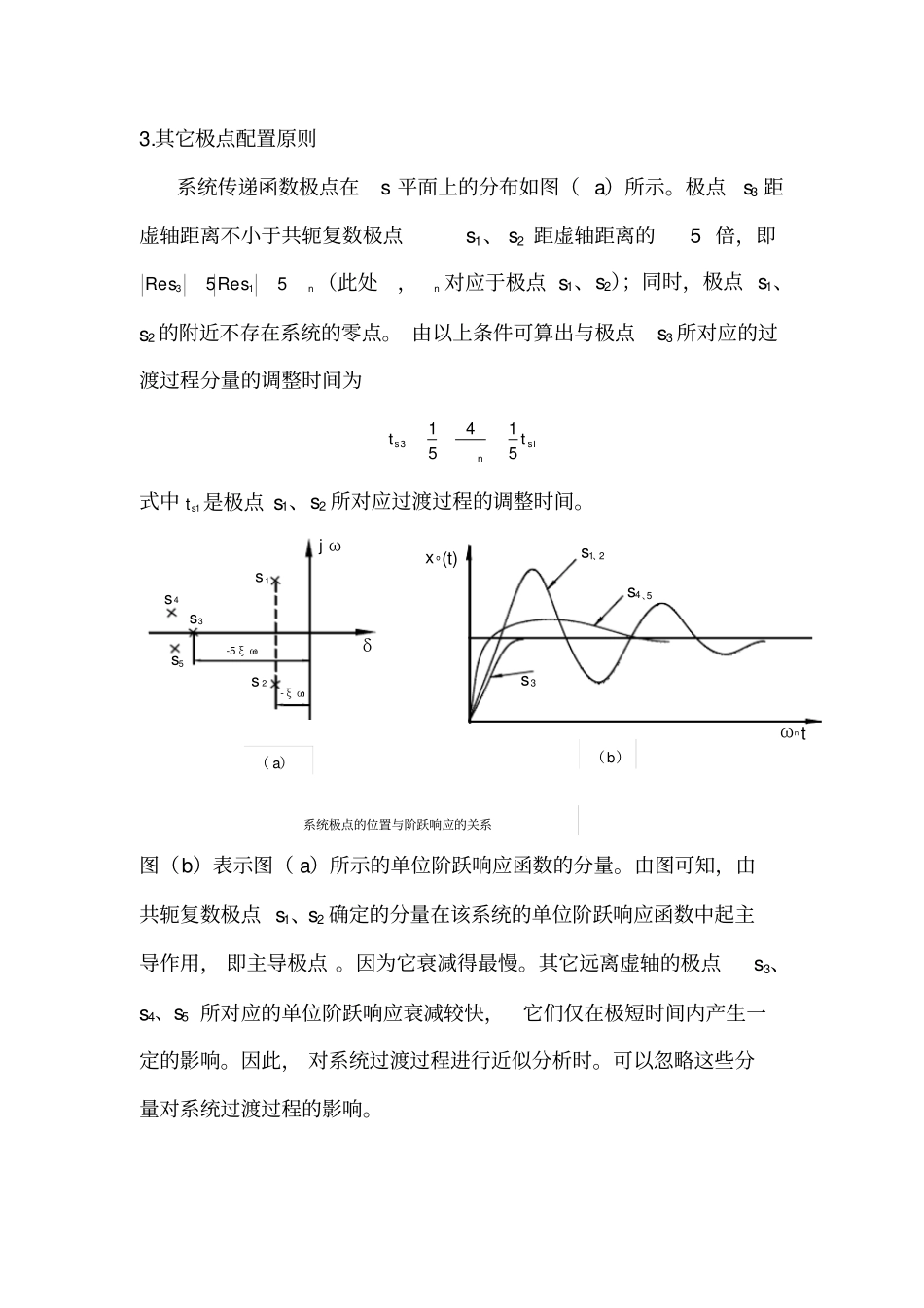
其它极点配置原则系统传递函数极点在s 平面上的分布如图( a)所示
极点s3 距虚轴距离不小于共轭复数极点s1、 s2 距虚轴距离的5 倍,即nss5Re5Re13(此处,n 对应于极点 s1、s2);同时,极点 s1、s2 的附近不存在系统的零点
由以上条件可算出与极点s3 所对应的过渡过程分量的调整时间为1351451snstt式中1st 是极点 s1、s2 所对应过渡过程的调整时间
图(b)表示图( a)所示的单位阶跃响应函数的分量
由图可知,由共轭复数极点 s1、s2 确定的分量在该系统的单位阶跃响应函数中起主导作用, 即主导极点
因为它衰减得最慢
其它远离虚轴的极点s3、s4、s5 所对应的单位阶跃响应衰减较快,它们仅在极短时间内产生一定的影响
因此, 对系统过渡过程进行近似分析时
可以忽略这些分量对系统过渡过程的影响
s 1s 2δj ω453sss- ξ ωn-5 ξ ωns1 24 5ωntx o(t)、s 、s3( a)(b)系统极点的位置与阶跃响应的关系二、极点配置实例磁悬浮轴承控制系统设计1
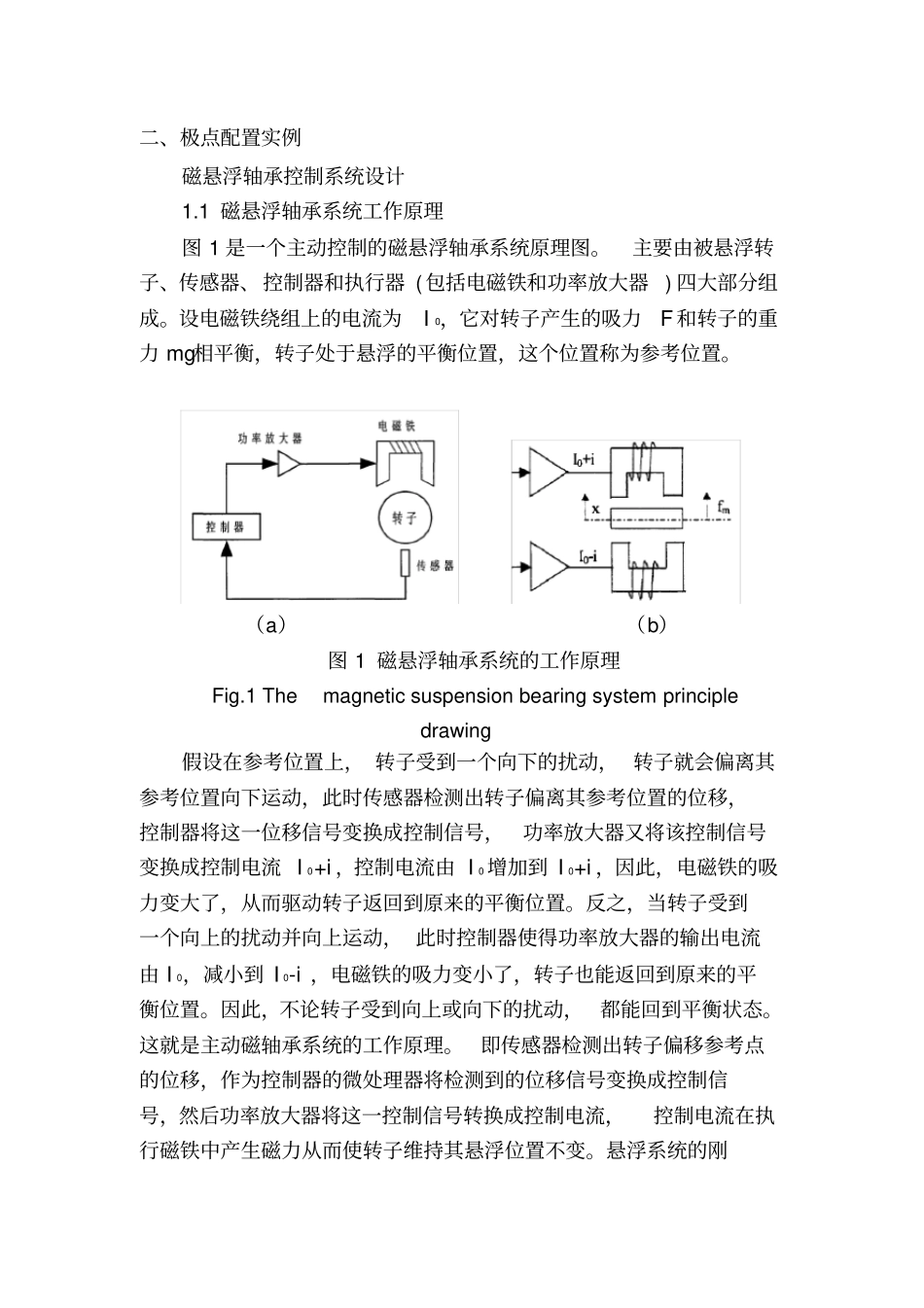
1 磁悬浮轴承系统工作原理图 1 是一个主动控制的磁悬浮轴承系统原理图
主要由被悬浮转子、传感器、控制器和执行器 (包括电磁铁和功率放大器) 四大部分组成
设电磁铁绕组上的电流为I 0,它对转子产生的吸力F 和转子的重力 mg相平衡,转子处于悬浮的平衡位置,这个位置称为参考位置
(a)(b)图 1 磁悬浮轴承系统的工作原理Fig
1 The magnetic suspension bearing system principle drawing