精品文档---下载后可任意编辑2 绝对航高:是相对干平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度
3 相对航高:是指摄影机物镜相对于某一基准面的高度,常称为摄影航高
是确定航摄飞机飞行的基本数据,按 H=mf 计算得到
4 中心投影:投影光线会聚于一点的投影称为中心投影
5 平行投影:投影光线相互平行的投影为平行投影
6 像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜即像片有倾斜,地面有起伏时,便会导致地面点在航摄像片上构像相对于在理想情况下的构像,产生了位置的差异,这一差异称为像点位移
7 摄影基线:航线方向相邻两个摄影站点间的空间距离
8 航向重叠:同一条航线上相邻两张像片的重叠度
9 旁向重叠:相邻航线相邻两像片的重叠度10 像片倾角:摄影瞬间摄影机的主光轴近似与 地面垂直,偏离铅垂线的夹角小于 2 度~3 度,夹角为像片倾角
11 像片的方位元素:确定摄影瞬间摄影物镜(摄影中心) 与像片在地面设定的空间坐标系中的位置与姿态的参数,即确定这三者之间相关位置的参数
12 像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y013 像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数
14 相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型
即确定一个立体像对两像片的相对位置
15 绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数称~16 单像空间后方交会 :利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线条件方程,反求该像片的外方位元素
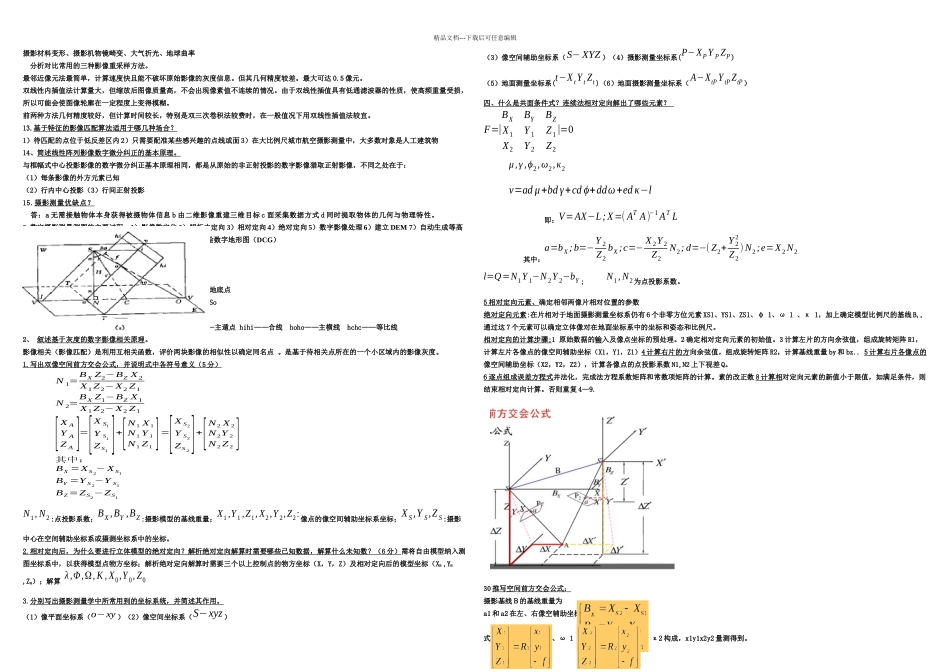
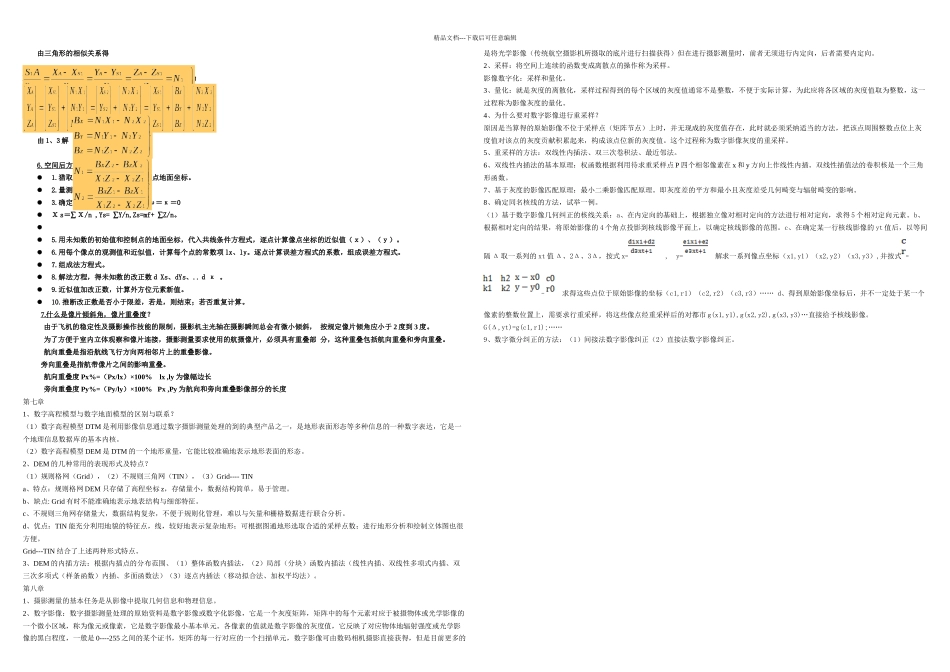
17 空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会
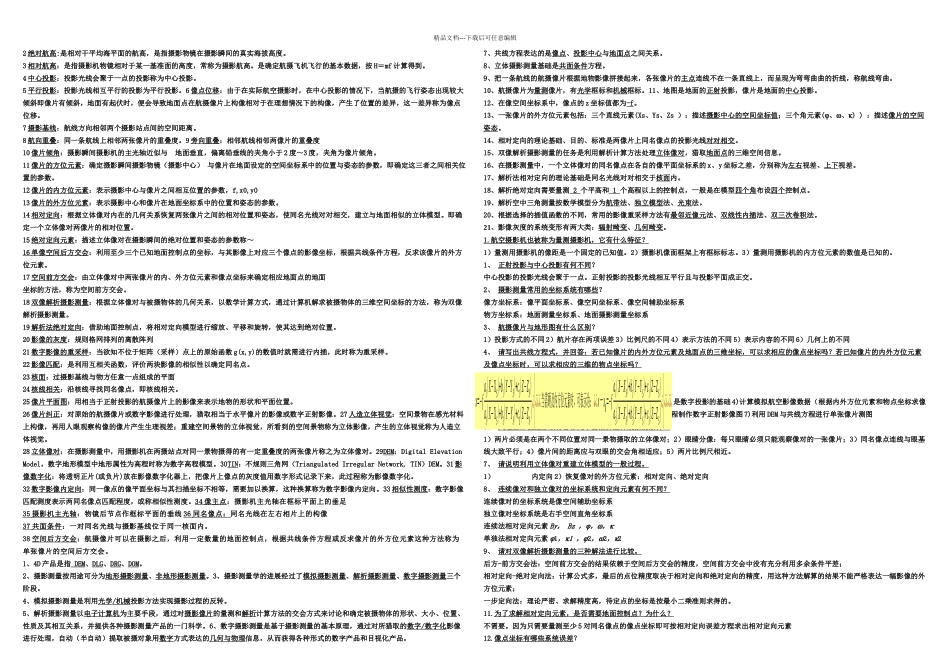
18 双像解析摄影测量:根据立体像对与被摄