电子导盲犬设计文档 一、任务:目标、环境、需求、局限 目标:能够帮助盲人朋友确定自己所在的位置,并且帮助盲人朋友安全顺利地到达目 的地
可使盲人朋友生活更加安全、自由、便捷
环境:通过智能小车上安装的 arm9 处理器
来实现全部的功能
需求:1、能前后左右移动;2、可测速、限速、变速;3、可动态壁障;4、能够识别简单的标志;5、可定位,发出简单的提示,识别简单的语音
局限:不能像正常导盲犬那样很好的跟盲人朋友进行沟通,协调
二、总体设计 控制功能主要是基于 arm9 的多功能处理器实验板,外接被控设备
通过接收外部的信息来实时的控制电子导盲犬的功能,比如定位、转向、语音提示等等
各个模块的开发单独进行的,但功能又不是独立了,因为还要协调其他模块才能使小车更好的协调
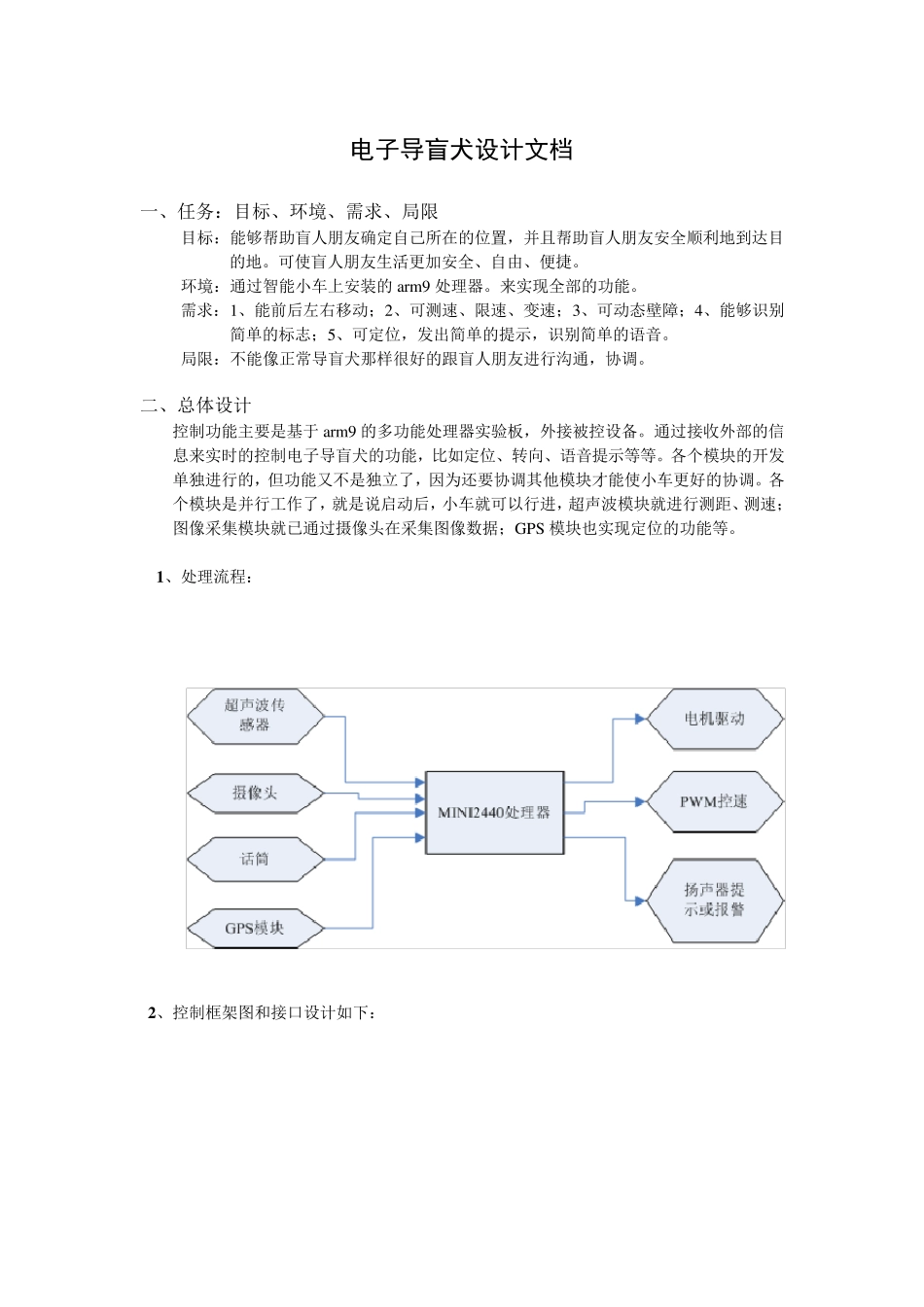
各个模块是并行工作了,就是说启动后,小车就可以行进,超声波模块就进行测距、测速;图像采集模块就已通过摄像头在采集图像数据;GPS 模块也实现定位的功能等
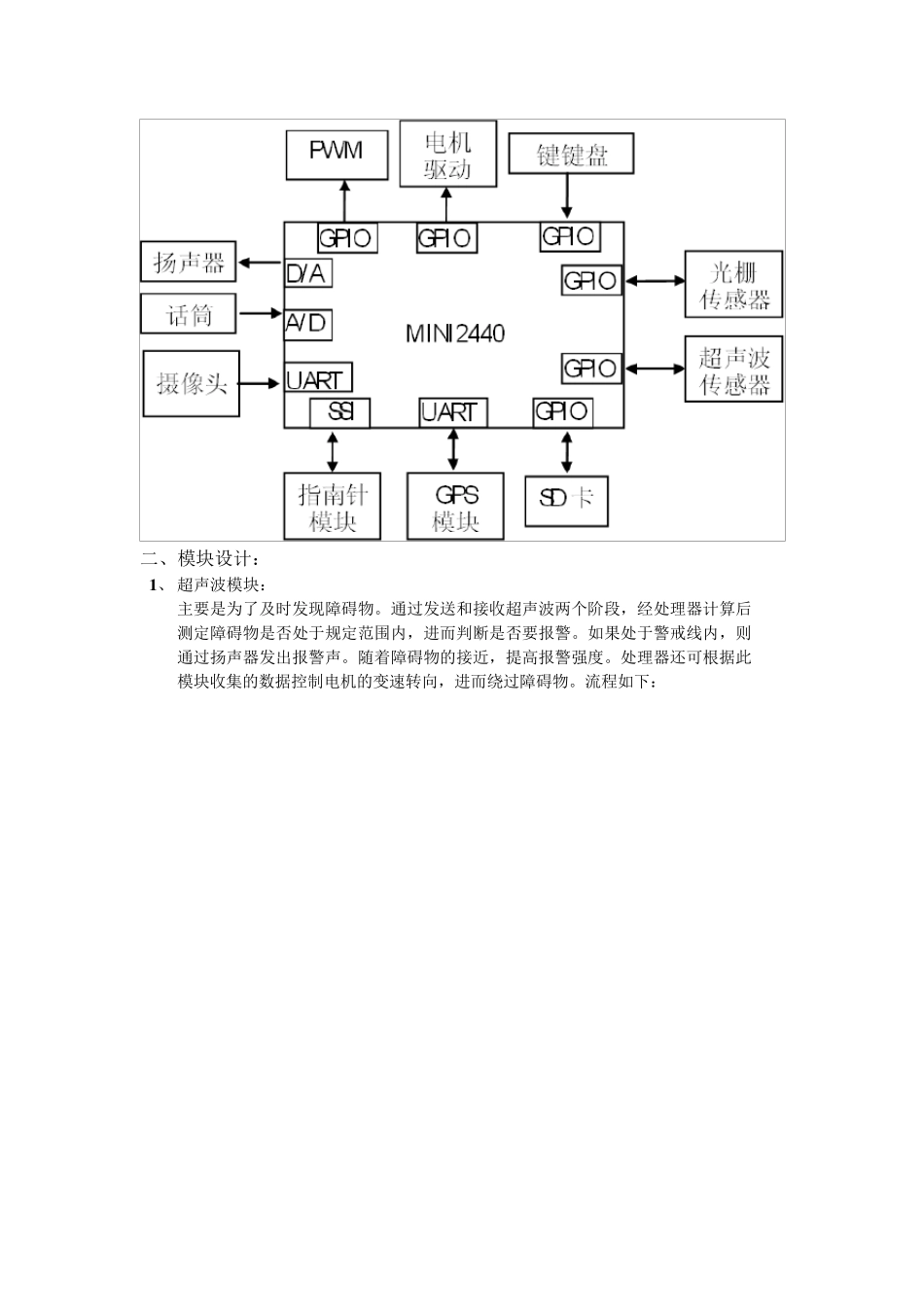
1 、处理流程: 2 、控制框架图和接口设计如下: 二、模块设计: 1 、 超声波模块: 主要是为了及时发现障碍物
通过发送和接收超声波两个阶段,经处理器计算后测定障碍物是否处于规定范围内,进而判断是否要报警
如果处于警戒线内,则通过扬声器发出报警声
随着障碍物的接近,提高报警强度
处理器还可根据此模块收集的数据控制电机的变速转向,进而绕过障碍物
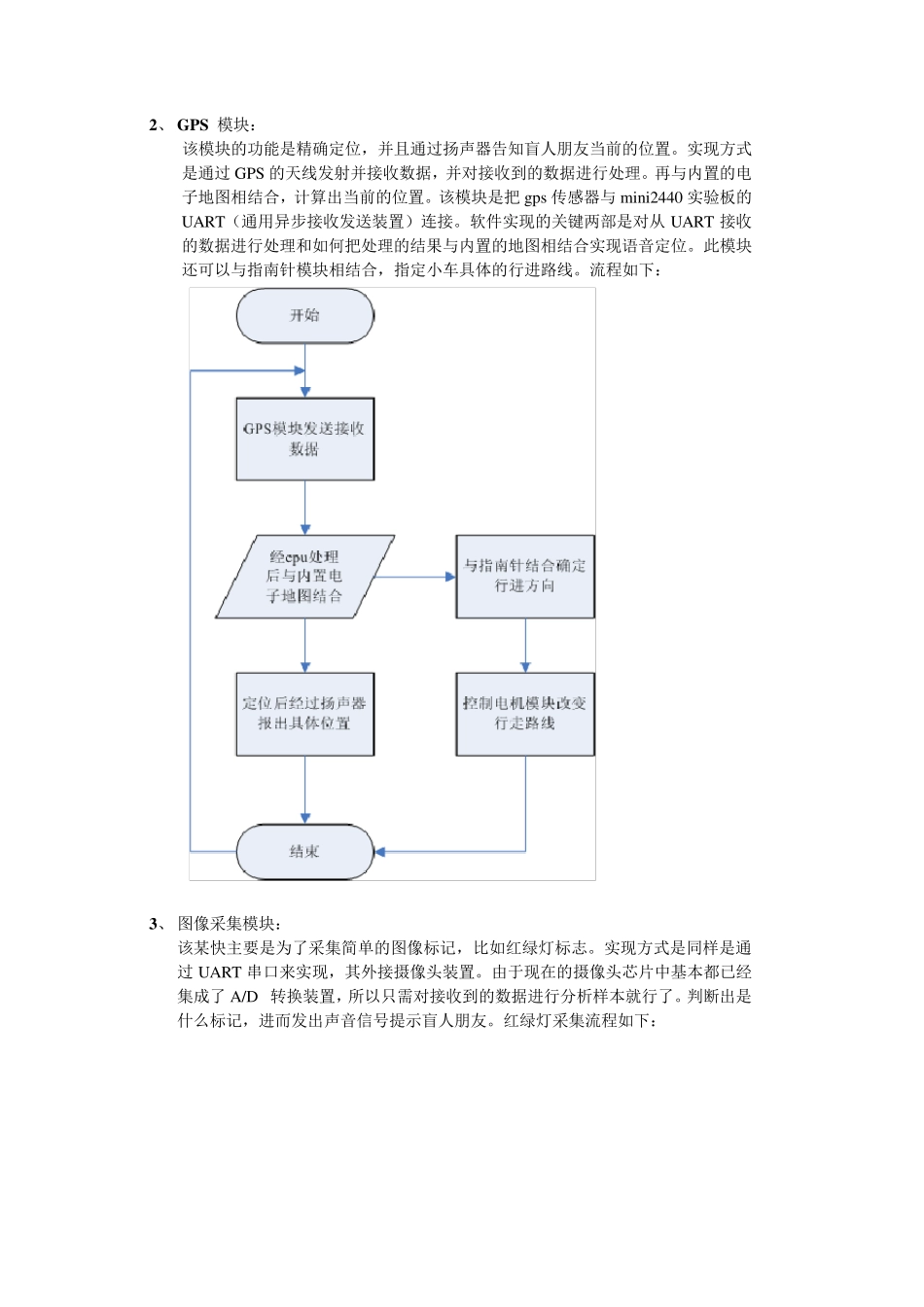
流程如下: 2、 GPS 模块: 该模块的功能是精确定位,并且通过扬声器告知盲人朋友当前的位置
实现方式是通过 GPS 的天线发射并接收数据,并对接收到的数据进行处理
再与内置的电子地图相结合,计算出当前的位置
该模块是把 gps传感器与 mini2440 实验板的UART(通用异步接收发送装置)连接
软件实现的关键两部是对从 UART 接收的数据进行处理和如何把处理的结果与内置的地图相结合实现语音定位