回路硬件仿真技术在直升机控制系统中的应用软、硬件的并行开发方法可以加快设计进程,但在系统整合时常常出现很多问题,而硬件回路仿真能有效解决这些问题,采纳该技术可以在开发周期初完成嵌入式软件仿真
本文以 HIL 技术在实验性动态直升机系统用嵌入式控制软件中的应用为例阐述该技术的应用特点和方法
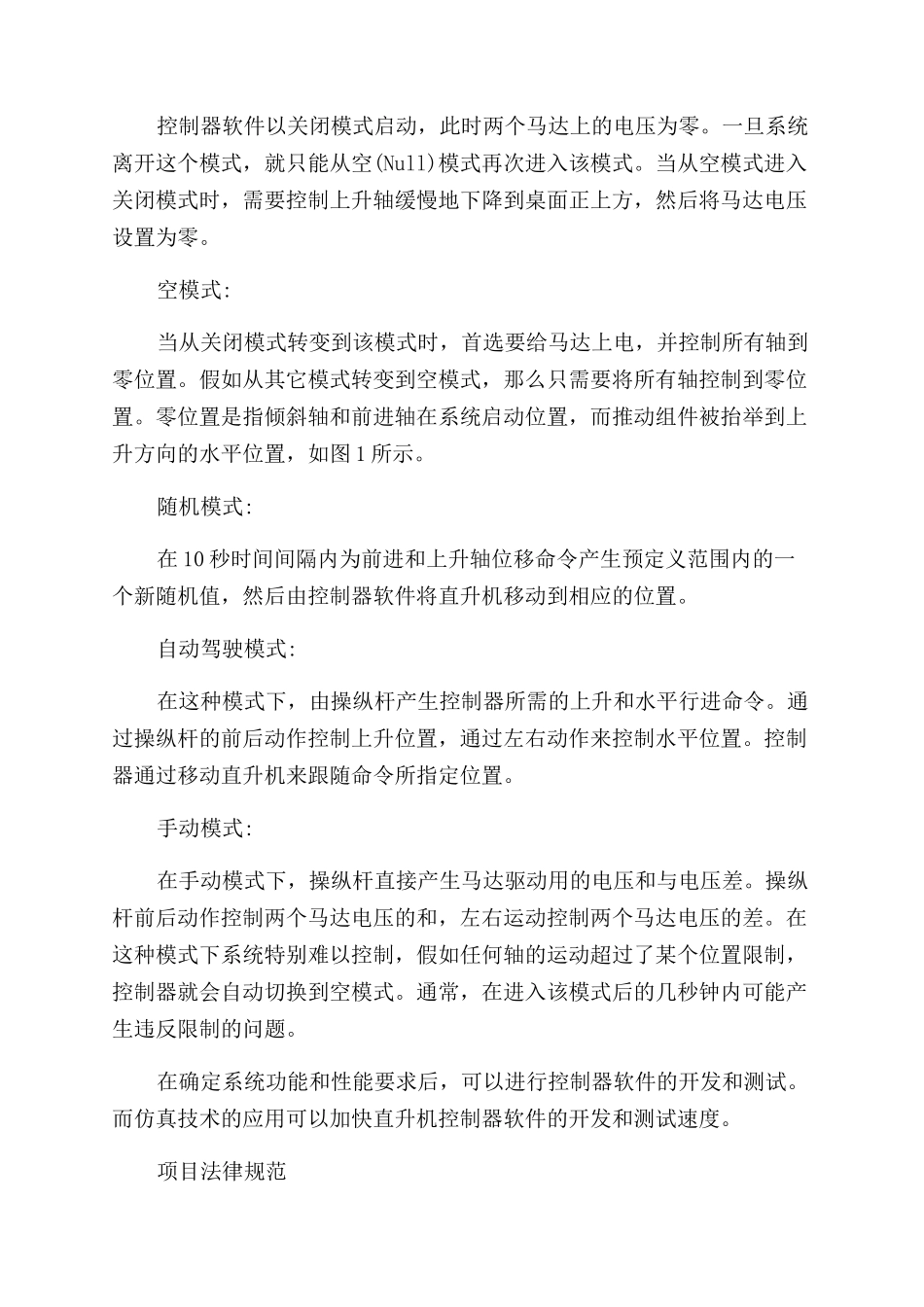
align=RIGHTVSPACE=12HSPACE=12ALT=图 1:直升机前视图和侧视图
设计工程师一直在努力缩短新产品开发周期,而软硬件并行开发就是一种比较好的方法
通常这种方法需要多个独立的软硬件开发小组参加,这些小组的工作相互间独立、并行地进行
当原型硬件和嵌入式代码的主要部分实现后,就可以在系统整合阶段将硬件与软件合并起来并开始测试工作
在系统整合时常常会发生严重的问题,有些问题甚至会导致软件或硬件的重新设计
在问题成堆发生、成本持续升高或计划拖延太久的情况下,有可能中断设计项目,有时甚至不得不取消项目
因此,人们需要找到更好的方法来解决这些问题
回路硬件(hardware-in-the-loop,HIL)仿真被证明是一种有效的解决方法
该技术能确保在开发周期早期就完成嵌入式软件的测试
到系统整合阶段开始时,嵌入式软件测试就要比传统方法做得更彻底更全面
这样可以及早地发现问题,因此降低了解决问题的成本
本文所要讨论的就是采纳了 HIL 仿真的一个嵌入式软件开发项目
该项目的目标是开发和测试实验性动态直升机系统用的嵌入式控制软件
有了 HIL 仿真后,人们无需使用除嵌入式处理器及其 I/O 接口外的任何硬件就能完成该控制器软件的设计和测试
随后的实际系统硬件与运行新软件的嵌入式控制器的连接首次便获得成功
在硬件、软件整合阶段唯一要做的额外工作是对一些控制器参数的少量调整,这是由于实际系统硬件与其仿真模型之间毕竟存在差异
直升机系统本项目需要开发适合 Quaner3 自由度(3D