现代控制理论实验(一)线性系统的状态反馈及极点配置——09级自动化本科线性系统的状态反馈及极点配置一.实验目的1.了解和掌握状态反馈及极点配置的原理
2.了解和掌握利用矩阵法及传递函数法计算状态反馈及极点配置的原理与方法
3.掌握在被控系统中如何进行状态反馈及极点配置,构建一个性能满足指标要求的新系统的方法
二.实验原理及说明一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说,当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标
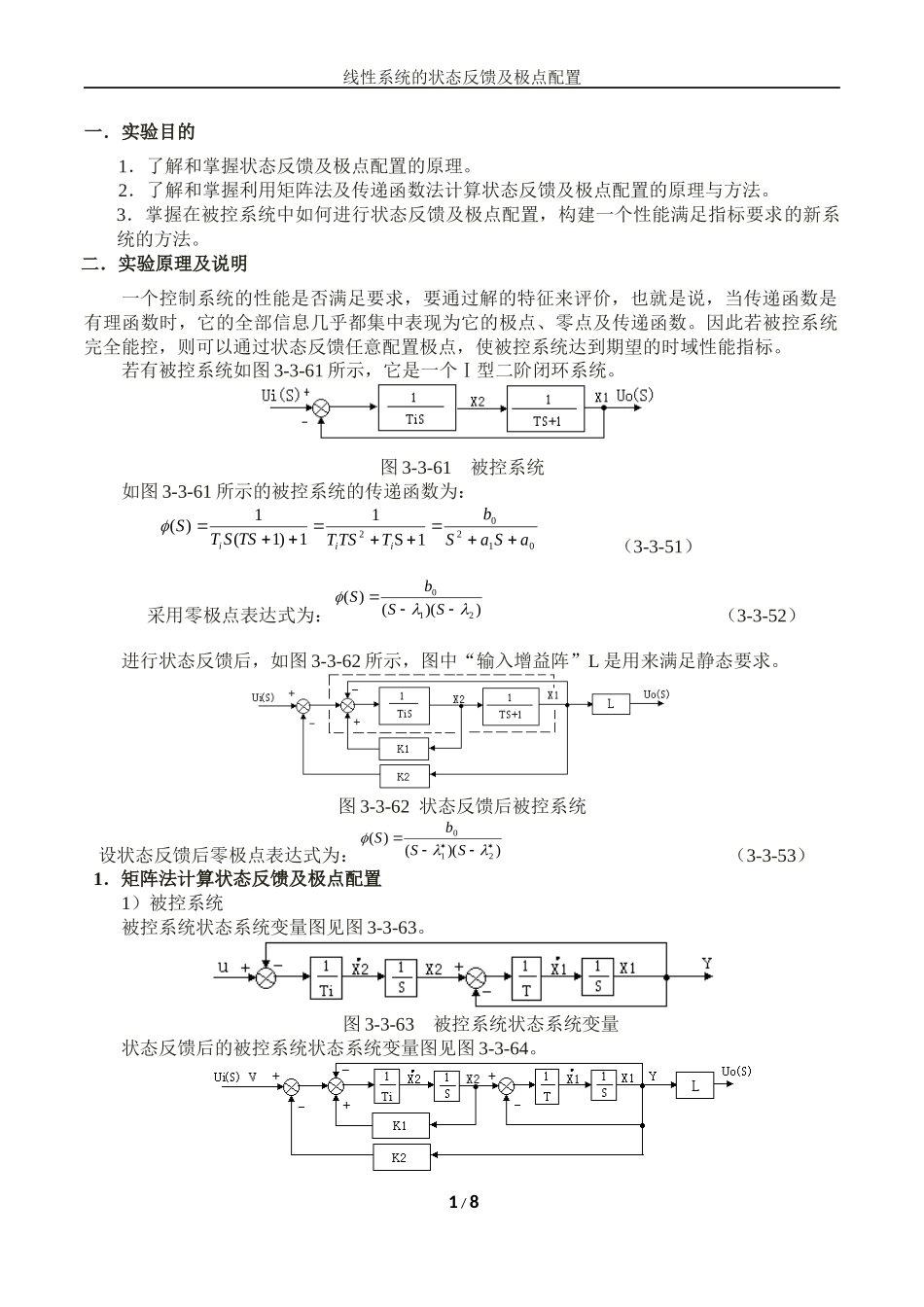
若有被控系统如图3-3-61所示,它是一个Ⅰ型二阶闭环系统
图3-3-61被控系统如图3-3-61所示的被控系统的传递函数为:(3-3-51)采用零极点表达式为:(3-3-52)进行状态反馈后,如图3-3-62所示,图中“输入增益阵”L是用来满足静态要求
图3-3-62状态反馈后被控系统设状态反馈后零极点表达式为:(3-3-53)1.矩阵法计算状态反馈及极点配置1)被控系统被控系统状态系统变量图见图3-3-63
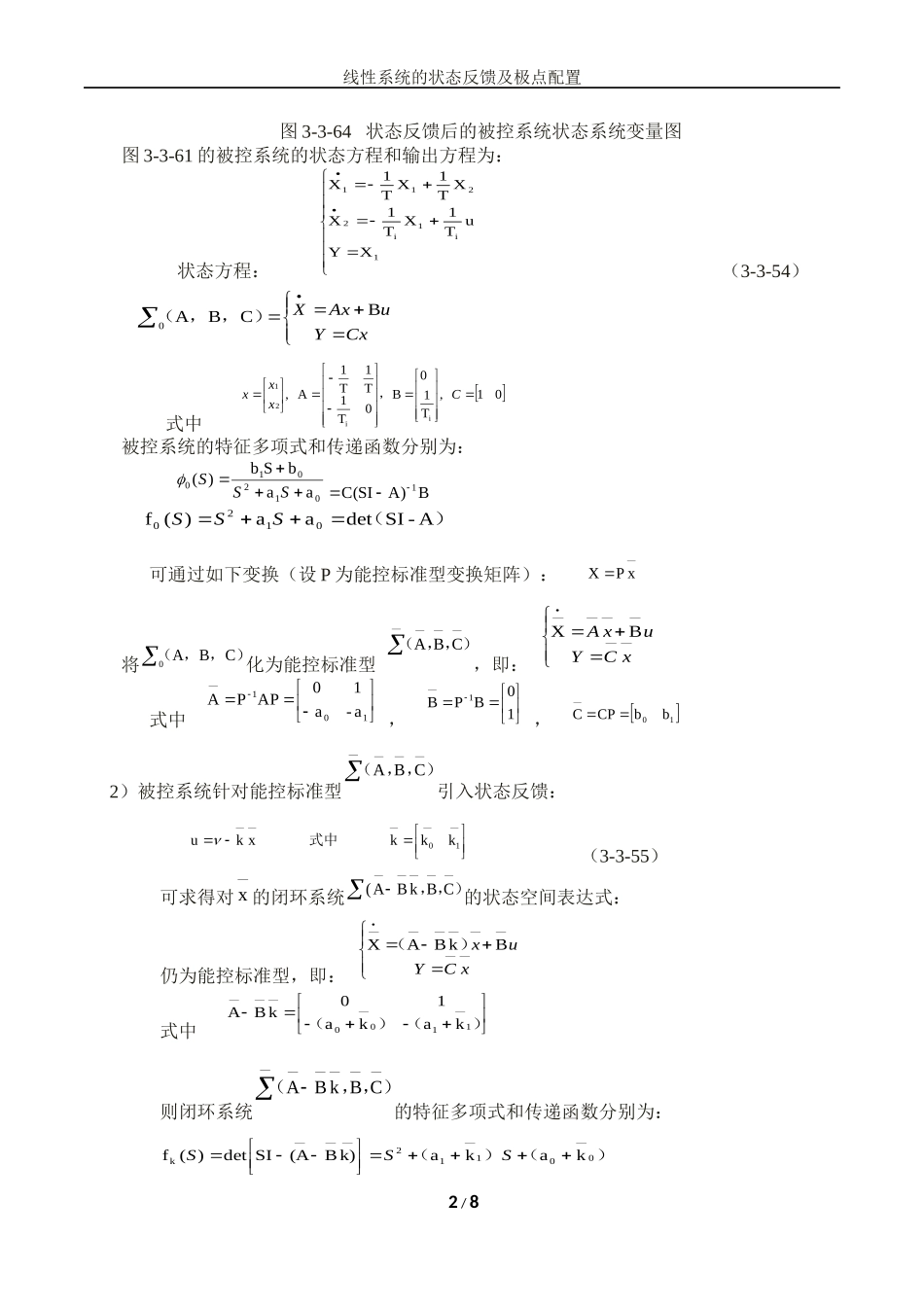
图3-3-63被控系统状态系统变量状态反馈后的被控系统状态系统变量图见图3-3-64
1/8012021S11)1(1)(aSaSbTTSTTSSTSiii))(()(210SSbS))(()(210SSbS线性系统的状态反馈及极点配置图3-3-64状态反馈后的被控系统状态系统变量图图3-3-61的被控系统的状态方程和输出方程为:状态方程:(3-3-54)式中被控系统的特征多项式和传递函数分别为:可通过如下变换(设P为能控标准型变换矩阵):将化为能控标准型,即:式中,,2)被控系统针对能控标准型引入状态反馈:(3-3-55)可求得对的闭环系统的状态空间表达式:仍为能控标