沿轨迹行走的机器人课题沿轨迹行走的机器人单元九学科信息技术年级学习目标1
认识轨迹识别传感器,了解轨迹识别传感器的原理
编写机器人循迹程序,了解程序的含义,能够自主编程
能够灵活使用多种方法,实现机器人的循迹,并分析其中的原因
搭建与调试机器人,使其能够按照圆环行走
重点编写机器人循迹程序,了解程序的含义,能够自主编程
难点能够灵活使用多种方法,实现机器人的循迹,并分析其中的原因
教学过程教学环节教师活动学生活动设计意图导入新课以两个小朋友对话的方式,来进入课题
女:玲玲,咱们能让机器人按照我们设计好的路线行走吗
男:你为什么要这么做呢
女:这样我就可以让机器人参加赛车游戏了
男:哇,那一定很好玩
我们赶紧问问老师怎么做吧
介绍轨迹识别传感器:轨迹识别传感器的主要组成部件是两组红外发射,接收器
他通过发射器发出信号,接收器接收反射回来的信号,来检测机器人下方路面的颜色是否一样,机器人根据左、右两个颜色值的大小来判断,机器人是在轨迹的左边、右边、上边、还是没有找到轨迹线
认真听讲,仔细思考,交流分享自己的看法
激发学生兴趣,导入课题
讲授新课一、认识轨迹识别传感器分别有:第一组探头、第二组探头、指示灯、传感器连接线
二、编写机器人循迹程序编写机器人循轨迹行走程序的方法很多,让我们从简单的开始学习吧
首先在色带框中,选择圆环
参考下图,在仿真界面画一个简单的圆环形轨迹地图
怎样利用轨迹传感器让机器人沿圆环轨迹行走呢
我们将轨迹识别传感器的两组探头看成机器人的两只眼睛,当机器人位于圆环的右下角认真听讲、仔细思考,动手操作程序,总结经验
编写程序能够实现所需功能,熟悉编程的过程
让学生了解轨迹识别传感器的原理,激发学生对沿轨迹行走机器人的兴趣
提高学生的动手能力
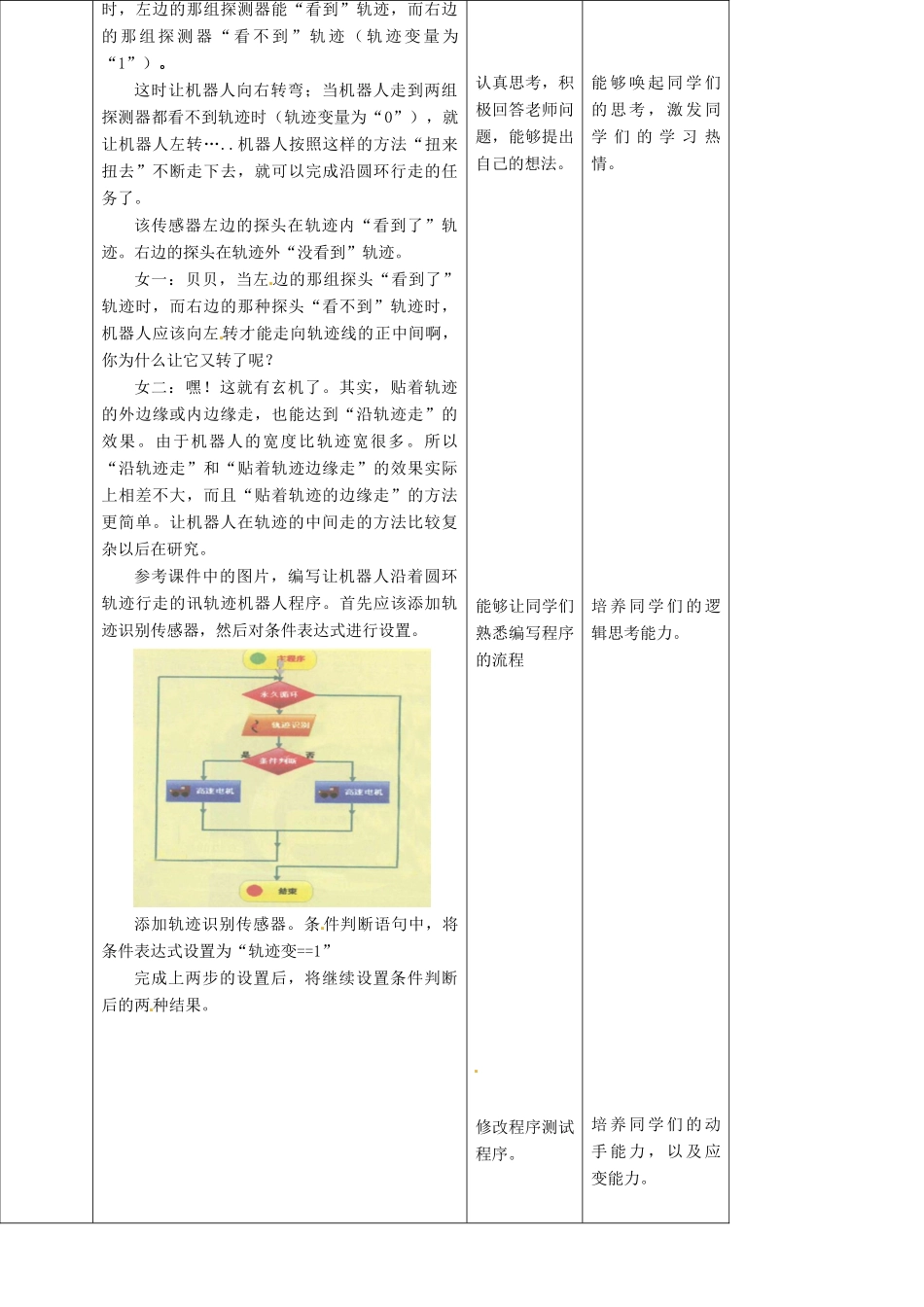
时,左边的那组探测器能“看到”轨迹,而右边的那组探测器“看不到”轨迹(轨迹变量为“1”)
这时让机器人向右转