重点I拿个小本本记下来,航测人必备1“数字测绘成果”的检查项数字线划图(DLG)、数字高程模型(DEM)、数字正射影像图(DOM)、数字栅格地图(DRG)
(4D)包括:1
参考数据对比
与已有的成果进行对比2
与野外调绘的数据对比3
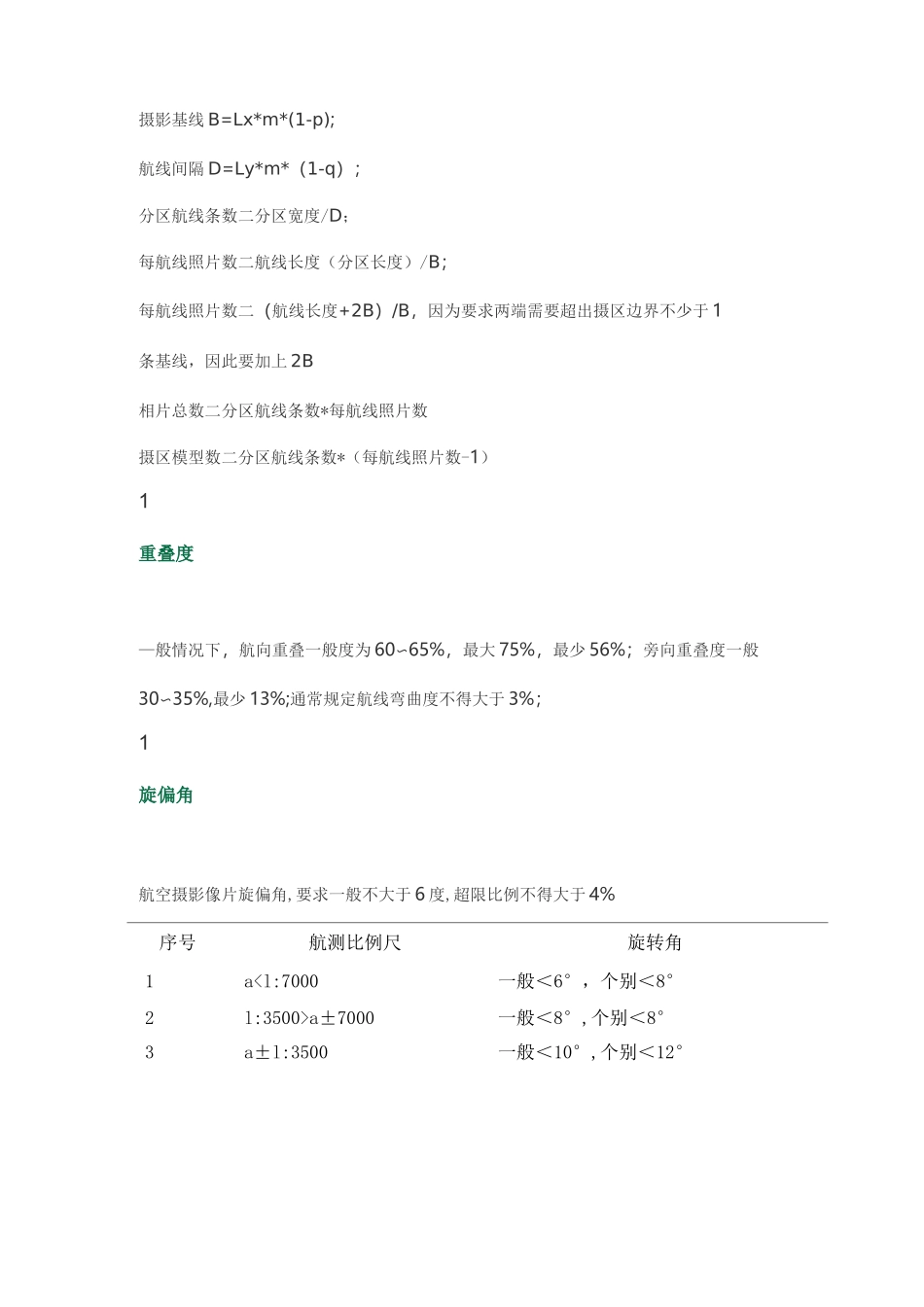
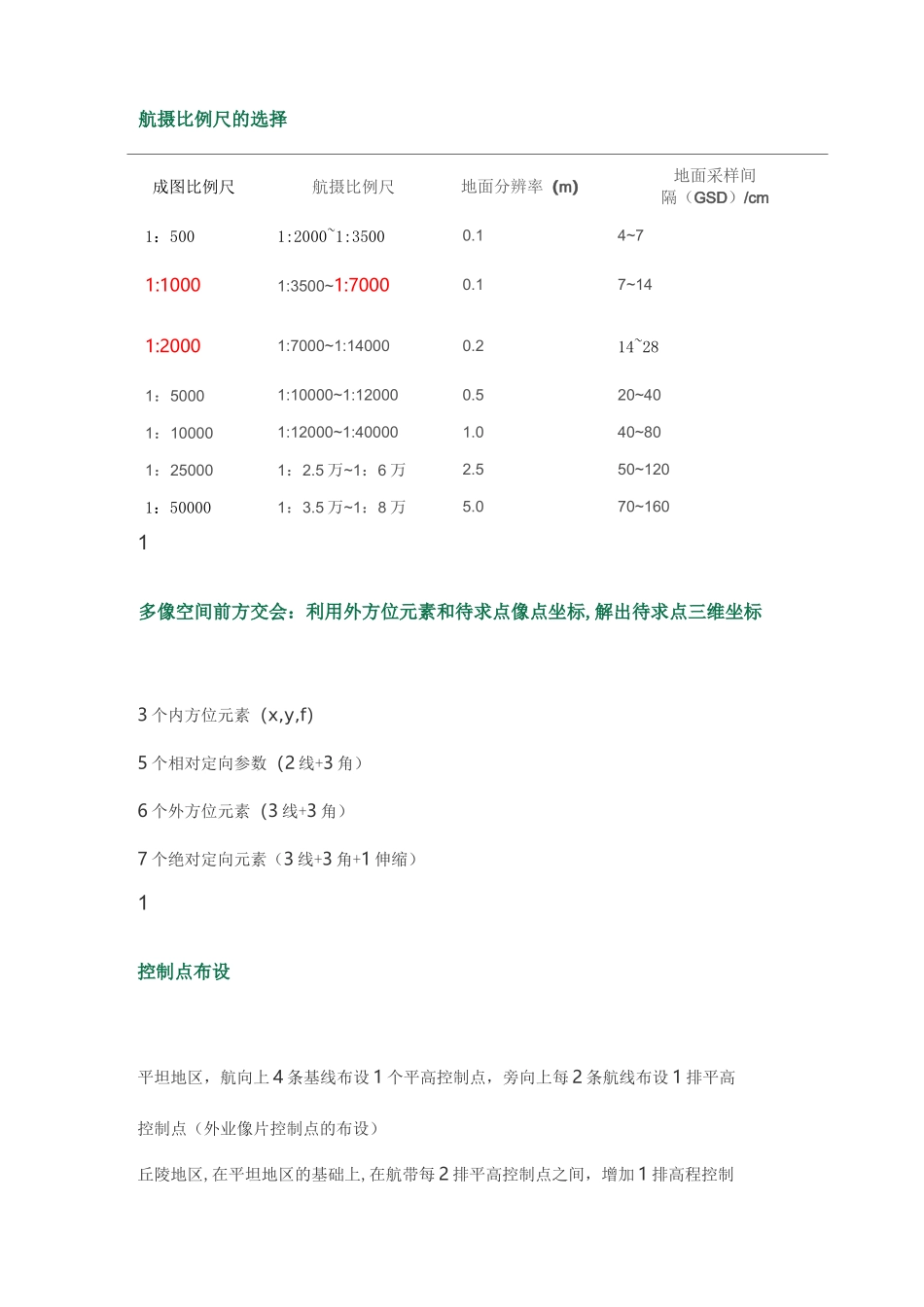
4•人机交互检查(混淆项:结构检查)1航线计算公式相对航高二主距f*比例尺分母m=f*m(1:m)基准面高=(最高点+最低点)/2绝对航高=基准面高+相对航高m=地面分辨率/像元大小Lx相片宽度;Ly相片高度;p航向重叠度;q旁向重叠度;摄影基线B=Lx*m*(1-p);航线间隔D=Ly*m*(1-q);分区航线条数二分区宽度/D;每航线照片数二航线长度(分区长度)/B;每航线照片数二(航线长度+2B)/B,因为要求两端需要超出摄区边界不少于1条基线,因此要加上2B相片总数二分区航线条数*每航线照片数摄区模型数二分区航线条数*(每航线照片数-1)1重叠度—般情况下,航向重叠一般度为60〜65%,最大75%,最少56%;旁向重叠度一般30〜35%,最少13%;通常规定航线弯曲度不得大于3%;1旋偏角航空摄影像片旋偏角,要求一般不大于6度,超限比例不得大于4%序号航测比例尺旋转角1aa±7000一般<8°,个别<8°3a±l:3500一般<10°,个别<12°航摄比例尺的选择成图比例尺航摄比例尺地面分辨率(m)地面采样间隔(GSD)/cm1:5001:2000~1:35000
14~71:10001:3500~1:70000
17~141:20001:7000~1:140000
214~281:50001:10000~1:120000
520~401:100001:12000~1:400001
040~801:250001:2
5万~1:6万2
550~1201:500001:3
5万~1:8万5
070~1601多像空间前方