第五章交流伺服系统控制方式5
1PID控制简介PID控制器具有通用性强与鲁棒性好的特点,所以在己有的各种控制手段中,它仍然占有重要地位
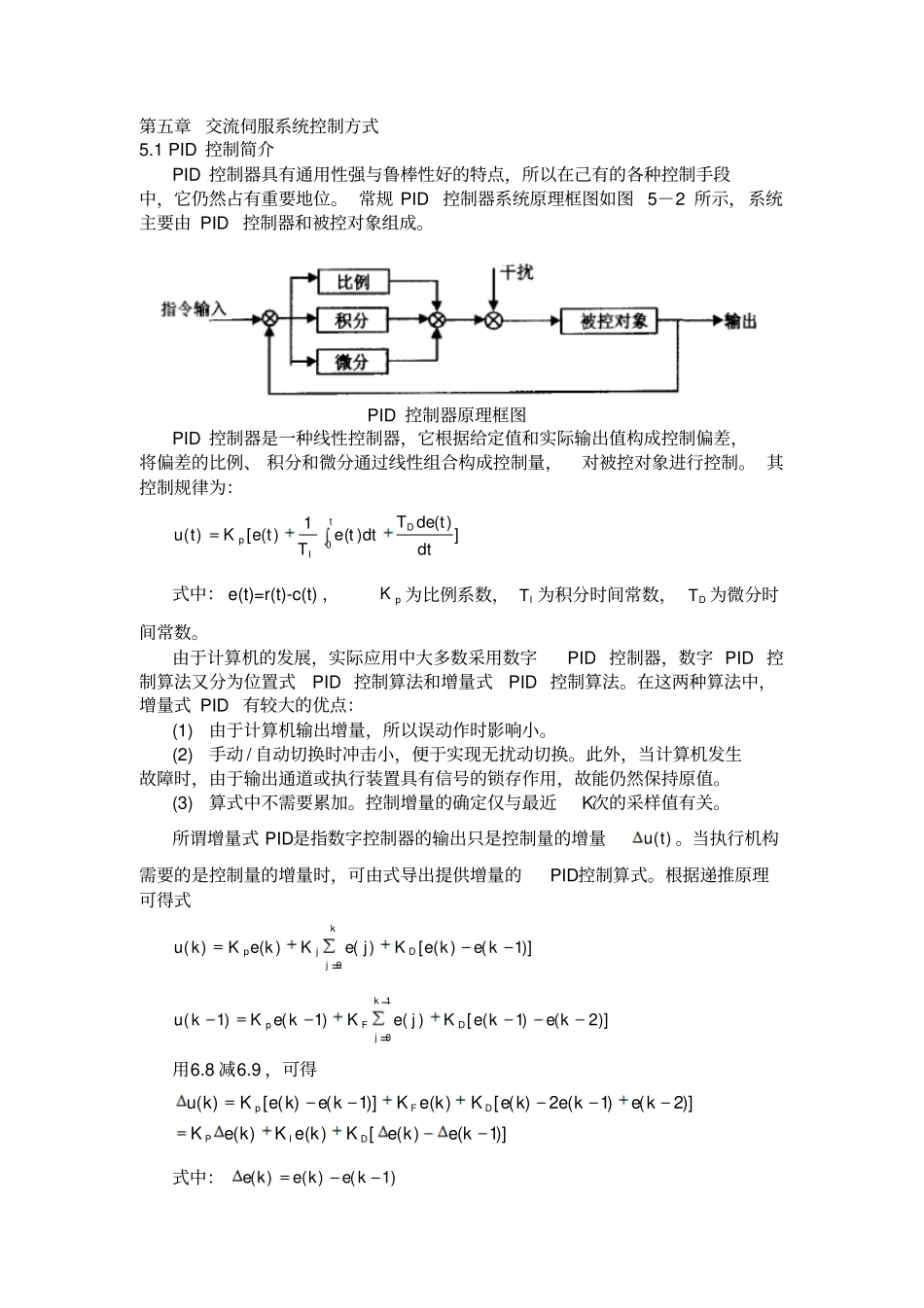
常规PID控制器系统原理框图如图5-2所示,系统主要由PID控制器和被控对象组成
PID控制器原理框图PID控制器是一种线性控制器,它根据给定值和实际输出值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制
其控制规律为:tDIpdttdeTdtteTteKtu0])()(1)([)(式中:e(t)=r(t)-c(t),pK为比例系数,IT为积分时间常数,DT为微分时间常数
由于计算机的发展,实际应用中大多数采用数字PID控制器,数字PID控制算法又分为位置式PID控制算法和增量式PID控制算法
在这两种算法中,增量式PID有较大的优点:(1)由于计算机输出增量,所以误动作时影响小
(2)手动/自动切换时冲击小,便于实现无扰动切换
此外,当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故能仍然保持原值
(3)算式中不需要累加
控制增量的确定仅与最近K次的采样值有关
所谓增量式PID是指数字控制器的输出只是控制量的增量)(tu
当执行机构需要的是控制量的增量时,可由式导出提供增量的PID控制算式
根据递推原理可得式kjDjpkekeKjeKkeKku0)]1()([)()()(10)]2()1([)()1()1(kjDFpkekeKjeKkeKku用6
9,可得)]1()([)()()]2()1(2)([)()]1()([)(kekeKkeKkeKkekekeKkeKkekeKkuDIPDFp式中:)1()()(kekeke式6
10称为增量式PID控制算法
可以看出,由于一般计算机控制系统采用恒定的采样周期T,一旦确定了pK,IK,DK只要使用前三次测量值的偏差,即可由式6
10求出控制增