第08课时简单机械【考纲要求】考纲要求1
杠杆平衡条件;4
运用杠杆平衡条件解决有关问题;5
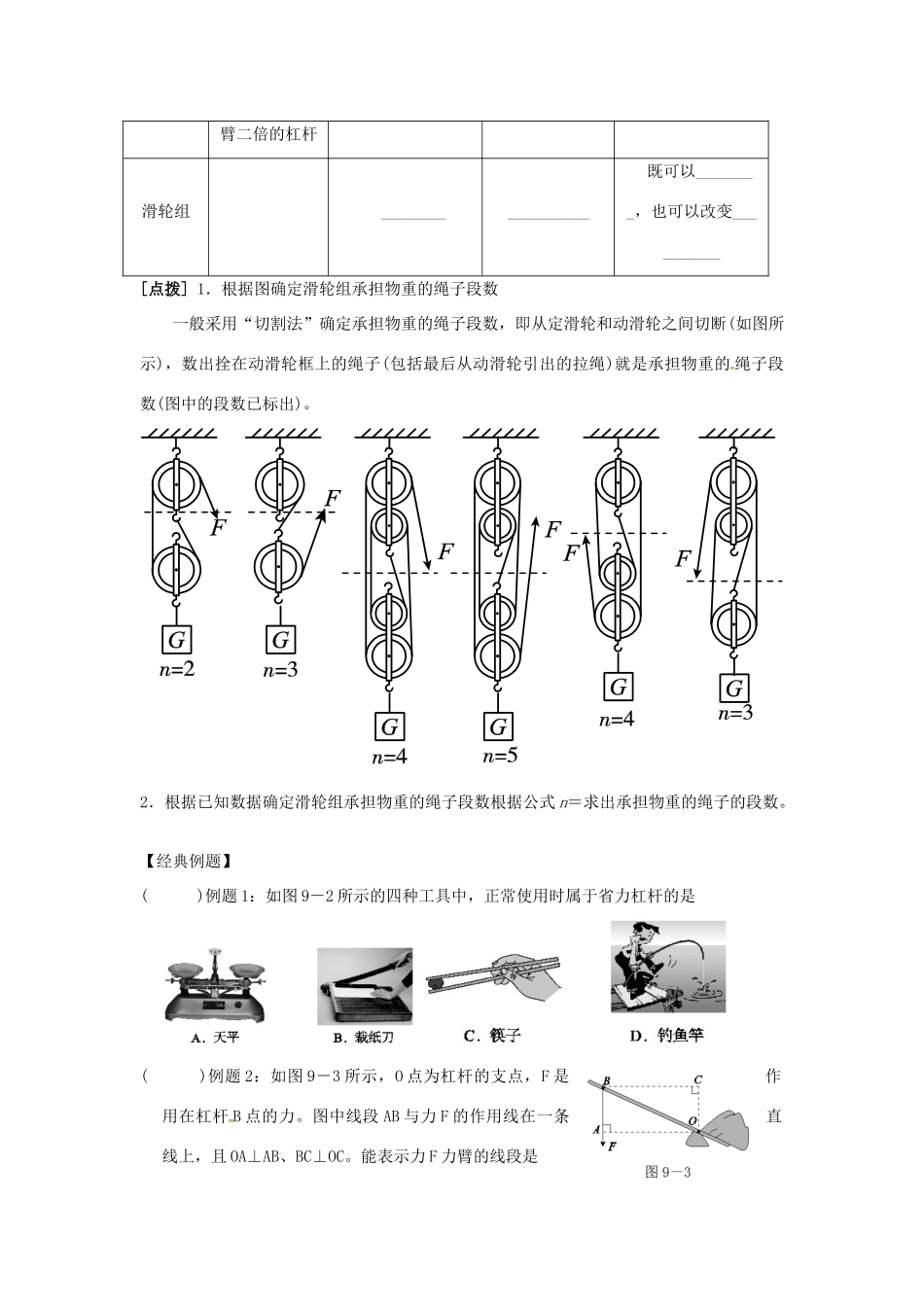
定滑轮、动滑轮和滑轮组的作用【考点聚焦】考点1杠杆1.杠杆的基本知识定义在力的作用下绕__________转动的硬棒叫杠杆五要素支点杠杆绕着转动的点,一般用字母______表示动力驱使杠杆________的力,一般用字母______表示阻力________杠杆转动的力,一般用字母______表示动力臂从支点到动力作用线的________,一般用字母L1表示阻力臂从支点到阻力作用线的________,一般用字母L2表示说明①动力、阻力都是杠杆受到的力,作用点在杠杆上;②杠杆可直、可曲,当支点在杠杆中间时,二力同向;当支点在杠杆一端时,二力反向[点拨]力臂画法:(1)找支点O;(2)画力的作用线(用虚线表示);(3)画力臂(用虚线表示,过支点垂直于力的作用线作垂线段);(4)标力臂(用大括号或背向箭头表示)
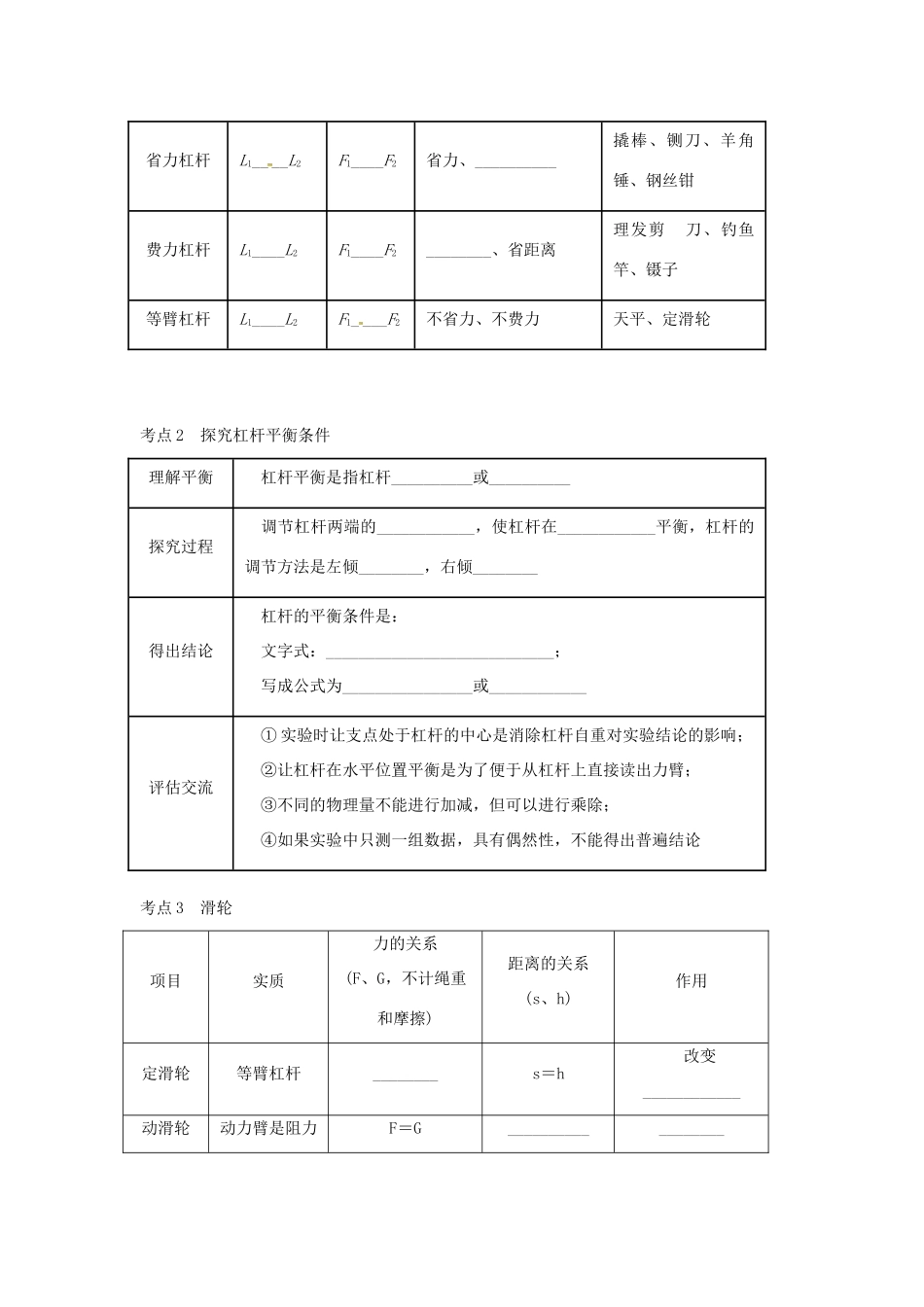
2.杠杆的分类名称力臂关系力的关系特点应用举例省力杠杆L1____L2F1____F2省力、__________撬棒、铡刀、羊角锤、钢丝钳费力杠杆L1____L2F1____F2________、省距离理发剪刀、钓鱼竿、镊子等臂杠杆L1____L2F1____F2不省力、不费力天平、定滑轮考点2探究杠杆平衡条件理解平衡杠杆平衡是指杠杆__________或__________探究过程调节杠杆两端的____________,使杠杆在____________平衡,杠杆的调节方法是左倾________,右倾________得出结论杠杆的平衡条件是:文字式:____________________________;写成公式为________________或____________评估交流①实验时让支点处于杠杆的中心是消除杠杆自重对实验结论的影响;②让杠杆在水平位置平衡