1 “有限元法基础及应用”补充讲义(一)顾克秋(2005 年 3 月)一、引子——弹簧单元与弹簧系统目标:掌握离散结构直接刚度法分析的原理和形式
了解有限元位移法列式的形式和基本概念
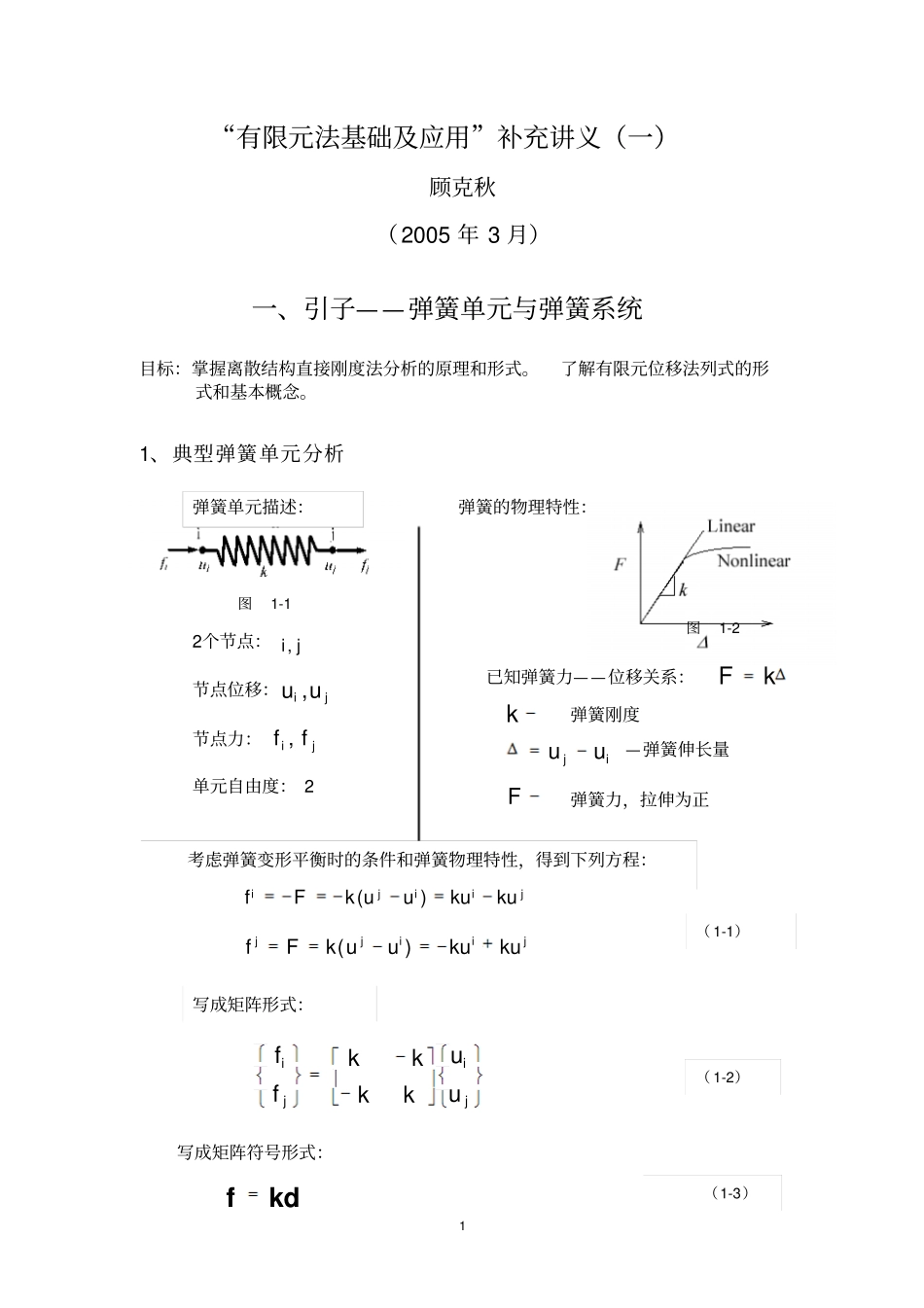
1、典型弹簧单元分析写成矩阵符号形式:2个节点:节点位移:节点力:单元自由度: 2 ji,ji uu ,jiff ,弹簧的物理特性:已知弹簧力——位移关系:kFijuuF弹簧力,拉伸为正—弹簧伸长量k弹簧刚度弹簧单元描述:考虑弹簧变形平衡时的条件和弹簧物理特性,得到下列方程:jiijikukuuukFf)(jiijjkukuuukFf)(jijiuukkkkff写成矩阵形式:kdf( 1-1)( 1-2)(1-3)图1-1 图1-2 式(1-2)、(1-3)为弹簧单元的刚度方程,反映了单元特性:节点力与节点位移之间的关系
式中:(注意:单元节点力是节点对单元的作用力)fdk——单元节点力列阵——单元节点位移列阵——弹簧单元的刚度矩阵弹簧单元刚度方程讨论:1)有何特点
对称、奇异、主对角元素恒正2)中元素代表什么含义
刚度系数大小等于弹簧刚度;每列元素代表一端固定、另一端产生单位位移时加在弹簧单元上的节点力
3)上面单元刚度方程可以求解吗
刚度方程仅仅表征一个典型单元的弹性特性,单元水平上无法确定单元节点位移
只有把系统中所有单元特性集成后,在系统水平上才可能求出所有未知位移和反力
单元水平上,若已知单元的节点位移,可由刚度方程求出所有单元节点力分量
若节点力已知,单元节点位移不能确定,单元可作刚体运动(小位移)
这也是单元刚度矩阵奇异性的物理解释
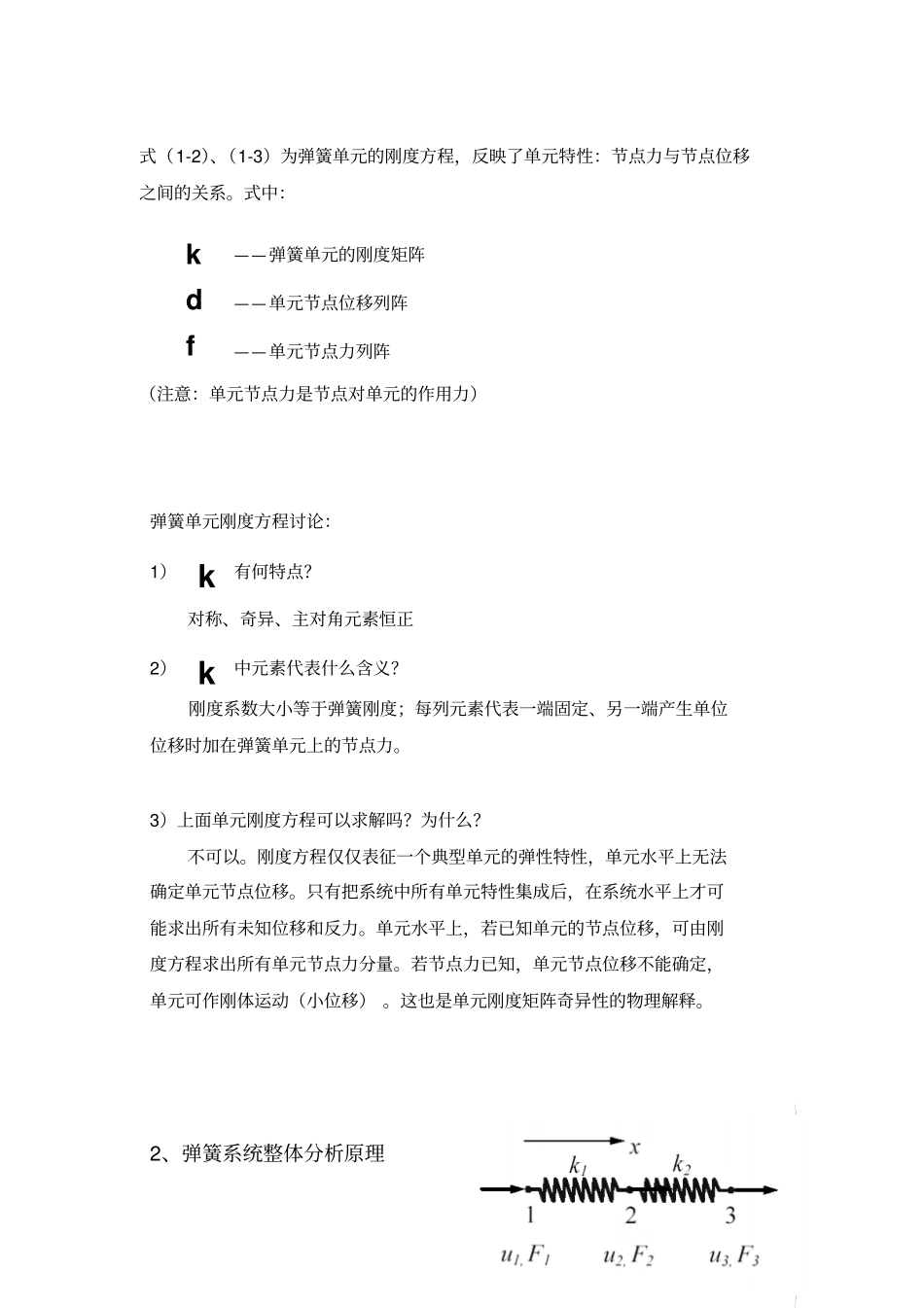
kk2、弹簧系统整体分析原理3 以右图的一个弹簧系统为例, 研究如何由单元特性集成系统特性并建立对系统进行求解的控制方程
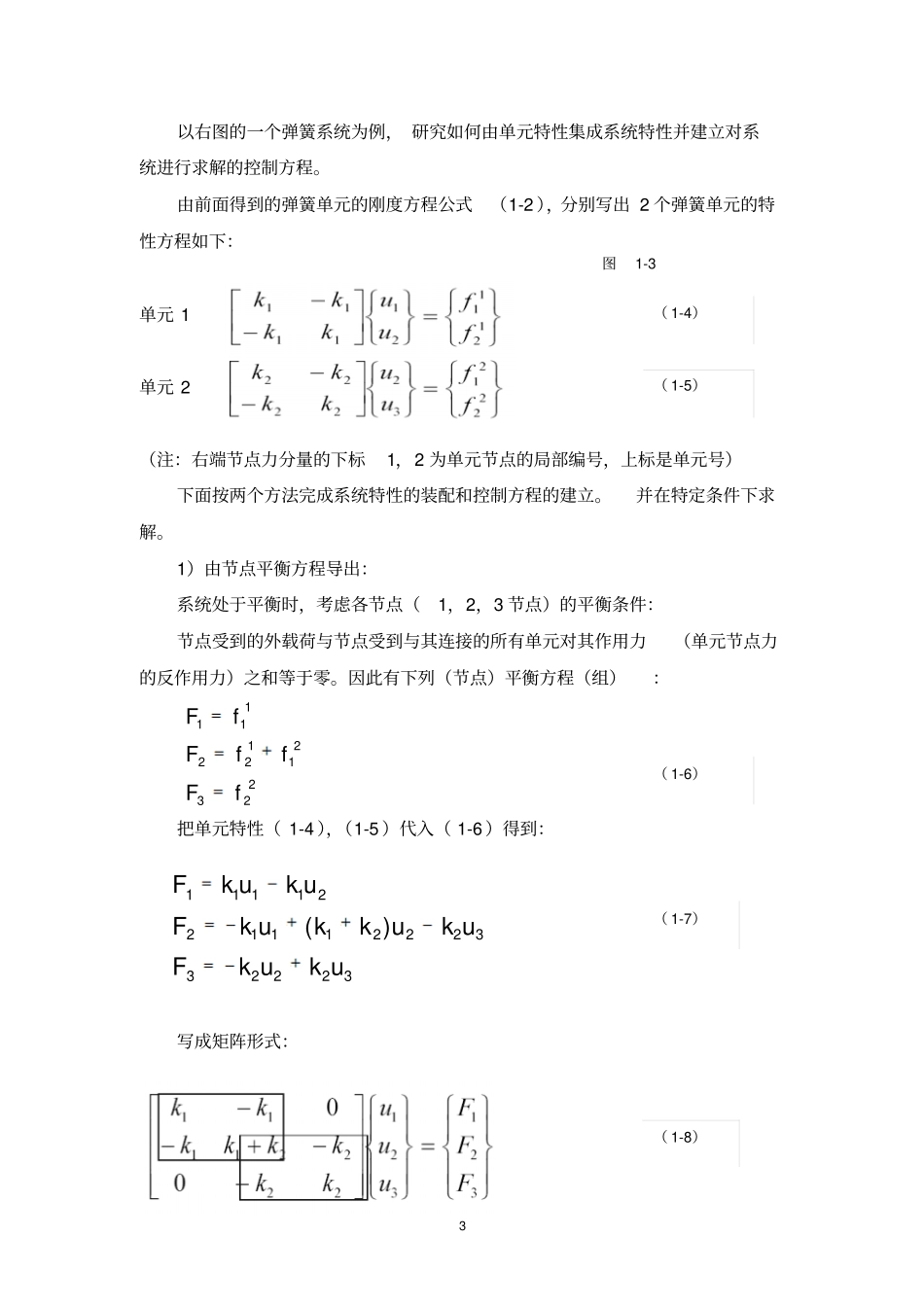
由前面得到的弹簧单元的刚度方程公式(1-2 ),分别写出 2 个弹簧单元的特性方程如下:单元 1 单元 2 (