第四章 根轨迹法 4-1 根轨迹的基本概念 一. 根轨迹概念: 闭环系统的动态性能与闭环极点在 s 平面上的位置密切相关,系统的闭环极点也就是特征方程式的根
当系统的某一个或某些参量变化时,特征方程的根在 s 平面上运动的轨迹称为根轨迹
根轨迹法: 直接由开环传递函数求取闭环特征根的方法
例: 设控制系统如图4 -1 所示 15
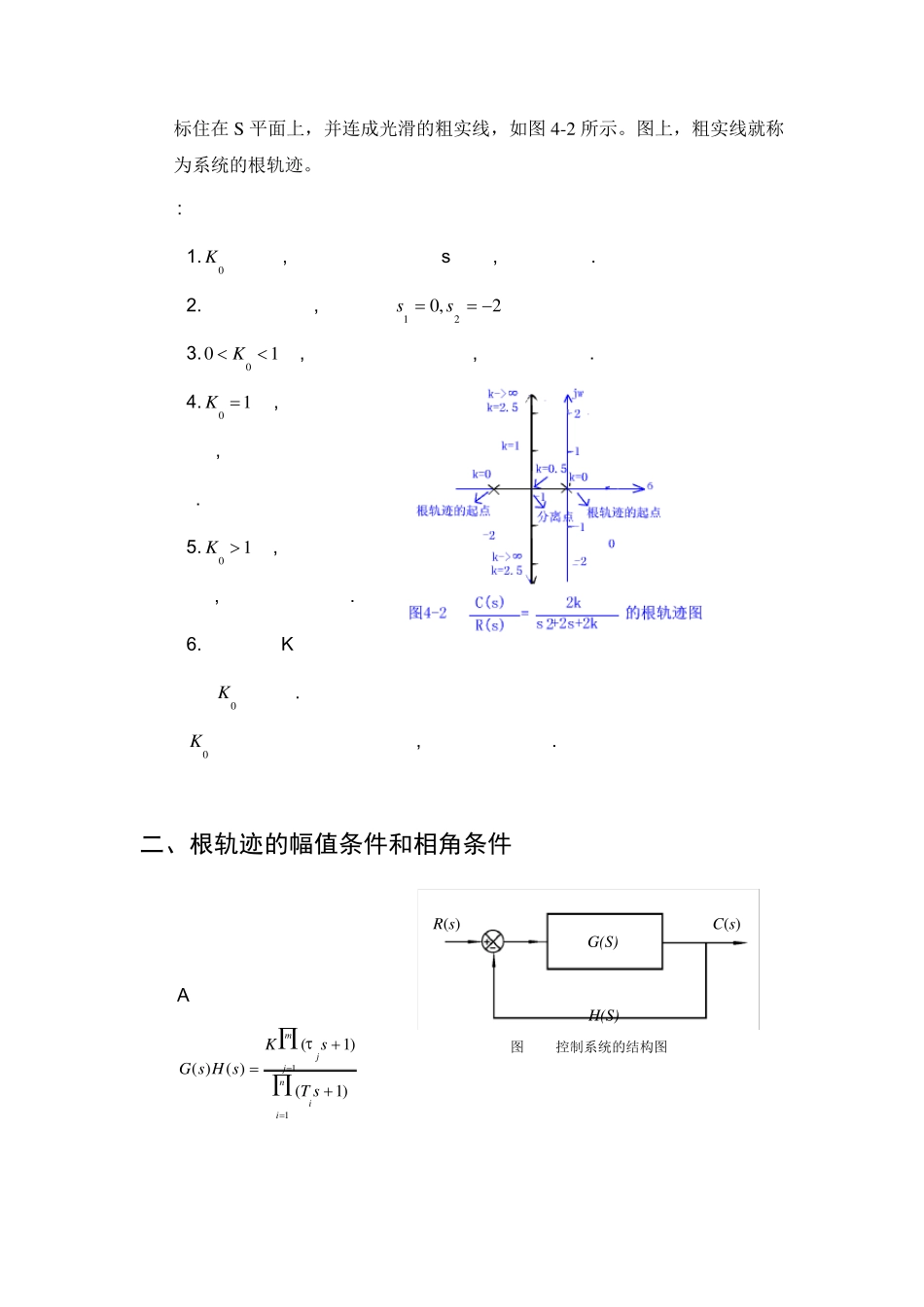
0ssKsG 2220ssKssK , 开环极点: 01 p, 22p 0202KssKsRsCs;式中KK20 此系统的特征方程式可写为: 02,1121102KsKsss 讨论: 200210ssK,时, 111210ssK,时, jsjsK112210,时, jsjsK11210,时, 令k 为0 ∞
可以用解析的方法求出闭环极点的全部数值,将这些数值 图4-1 控制系统的结构图 R(s) C(s) K s(0
5s+1) 标住在S 平面上,并连成光滑的粗实线,如图4-2 所示
图上,粗实线就称为系统的根轨迹
0K 变化时,根轨迹均位于左半 s平面,系统恒稳定
根轨迹有两条,两个起点2,021ss 3
100 K时,闭环特征根为负实根,呈过阻尼状态
10 K时,闭环特征根为一对重根,响应为单调上升的指数曲线
10 K时,闭环特征根为共轭复根,响应为衰减振荡
开环增益 K 可有根轨迹上对应的0K 值求得
0K 为可变参量绘制的根轨迹,称为常规根轨迹
二、根轨迹的幅值条件和相角条件 设单闭环控制系统框图如图: 通常有两种表示形式: A.时间常数形式: niimjjsTsKsHsG11)1()1()()( 图4-3 控制系统的