第三章 地理加权回归模型介绍 3
1 基本模型 在地学空间分析中,n 组观测数据通常是在 n 个不同地理位置上获取的样本数据,全局空间回归模型就是假定回归参数与样本数据的地理位置无关,或者说在整个空间研究区域内保持稳定一致,那么在 n 个不同地理位置上获取的样本数据,就等同于在同一地理位置上获取的 n 个样本数据,其回归模型与最小二乘法回归模型相同,采用最小二乘估计得到的回归参数户既是该点的最优无偏估计,也是研究区域内所有点上的最优无偏估计
而在实际问题研究中我们经常发现回归参数在不同地理位置上往往表现为不同,也就是说回归参数随地理位置变化,这时如果仍然采用全局空间回归模型,得到的回归参数估计将是回归参数在整个研究区域内的平均值,不能反映回归参数的真实空间特征
为了解决这一问题,国外有些学者提出了空间变参数回归模型(Spatially Vary ing-Coeffi Cient Regression Model) (Fosterand Gorr,1986; Gorrand Olligschlaeger,1994),将数据的空间结构嵌入回归模型中,使回归参数变成观测点地理位置的函数
Fortheringham 等(Bru nsdonetal,1996;Fortheringham et al,1997;Bru nsdon et al,1998)在空间变系数回归模型基础上利用局部光滑思想,提出了地理加权回归模型(Geographieally Weighted Regression Model-GWR)
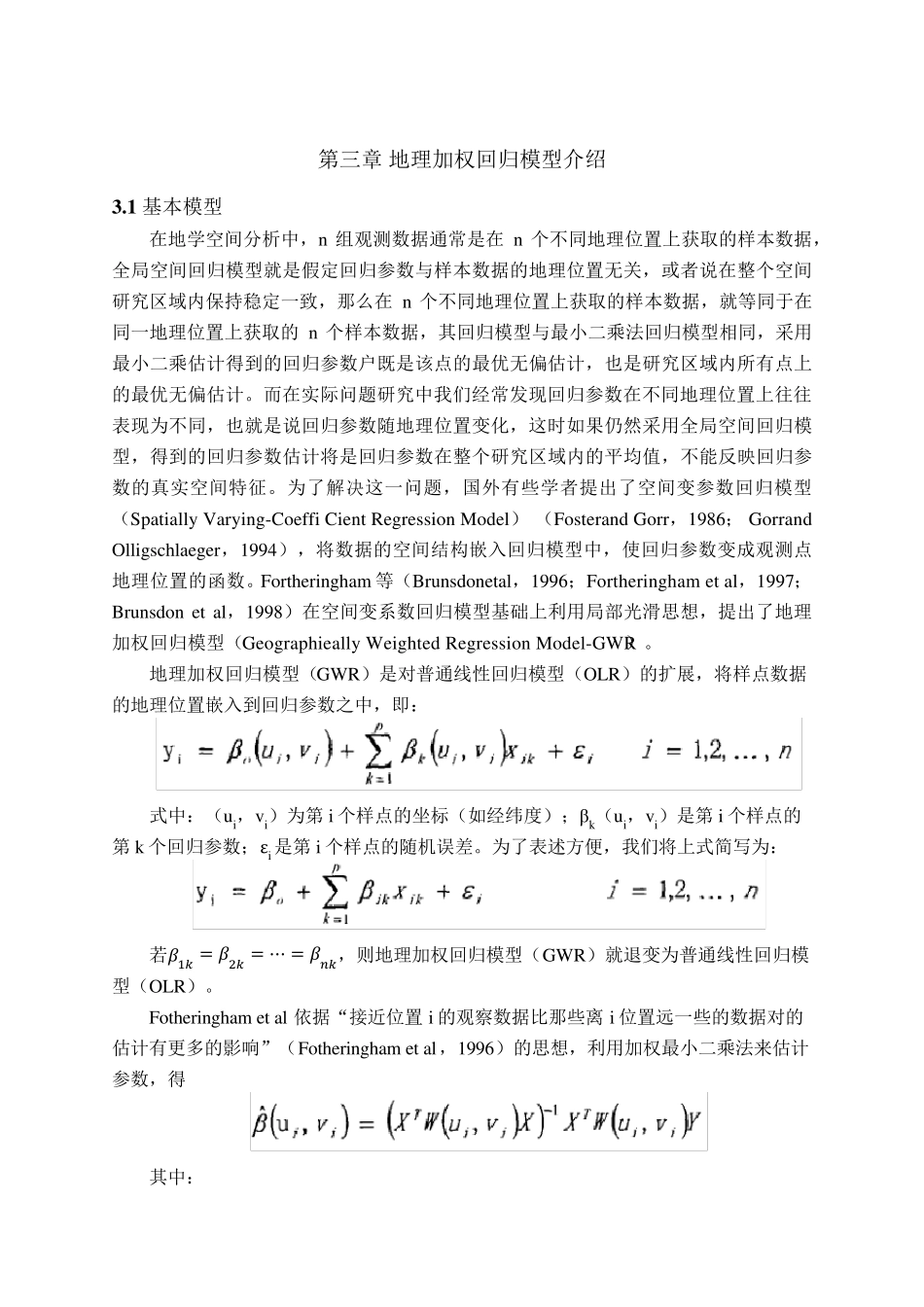
地理加权回归模型(GWR)是对普通线性回归模型(OLR)的扩展,将样点数据的地理位置嵌入到回归参数之中,即: 式中:(u i,v i)为第 i 个样点的坐标(如经纬度);βk(u i,v i)是第 i 个样点的第 k 个回归参数;εi是第 i 个样点的随机误差
为了表述方便,我