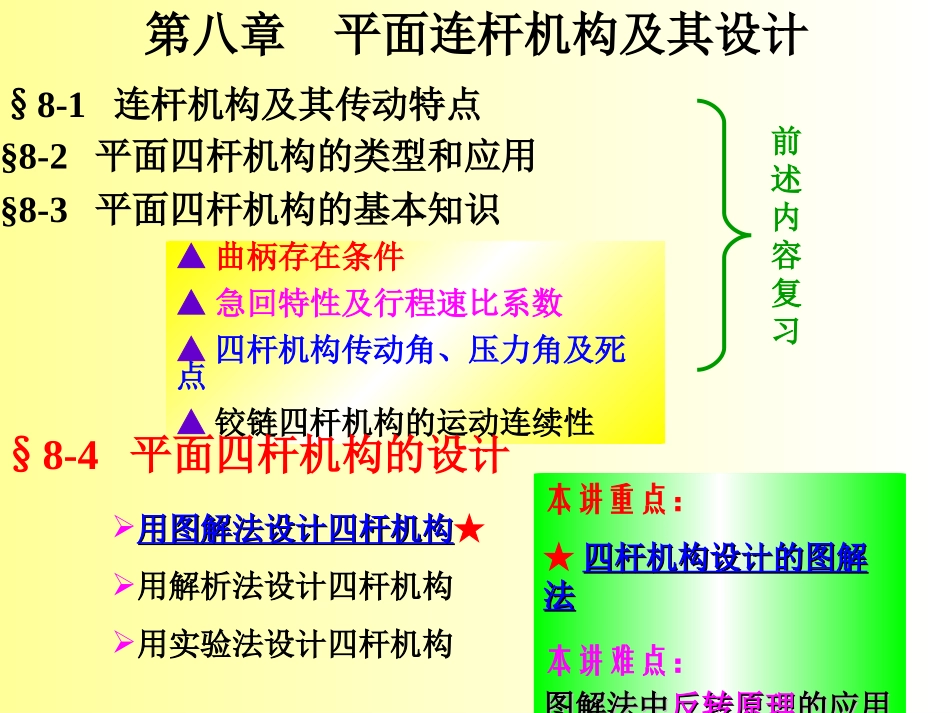
§8-1连杆机构及其传动特点第八章平面连杆机构及其设计§8-2平面四杆机构的类型和应用§8-3平面四杆机构的基本知识▲曲柄存在条件▲急回特性及行程速比系数▲四杆机构传动角、压力角及死点▲铰链四杆机构的运动连续性§8-4平面四杆机构的设计用图解法设计四杆机构用图解法设计四杆机构★用解析法设计四杆机构用实验法设计四杆机构本讲重点:★四杆机构设计的图解四杆机构设计的图解法法本讲难点:图解法中图解法中反转原理反转原理的应用的应用前述内容复习aBbACa)aBbACeb)aBbACec)d)aCABb=0a+bC2b-aC1a+bC2b-aC1C2C1问题讨论:下列机构有无急回特性,若有,标出极位夹角
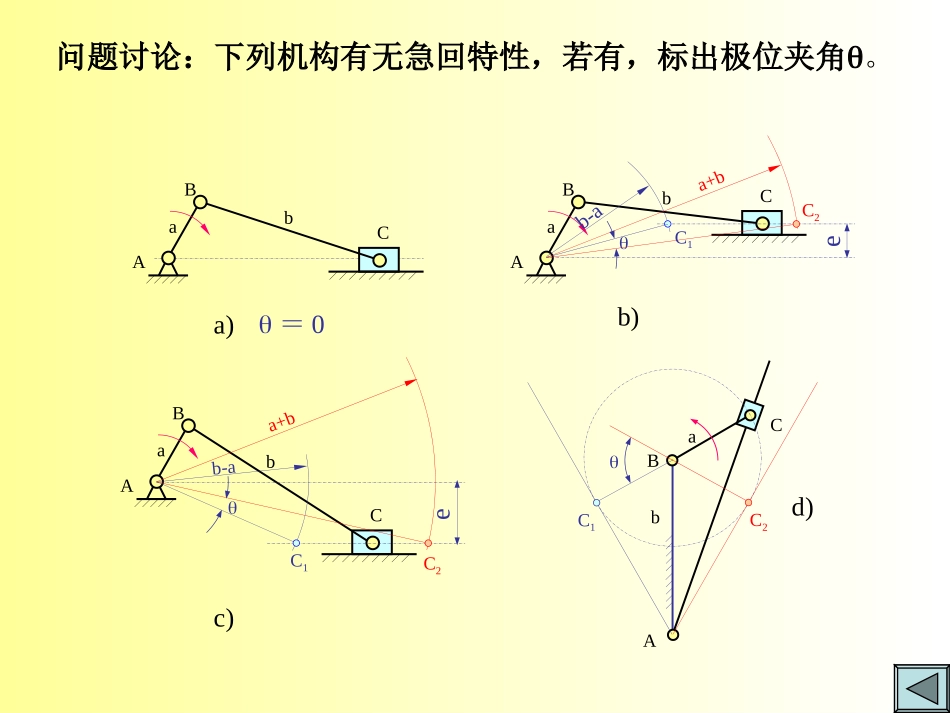
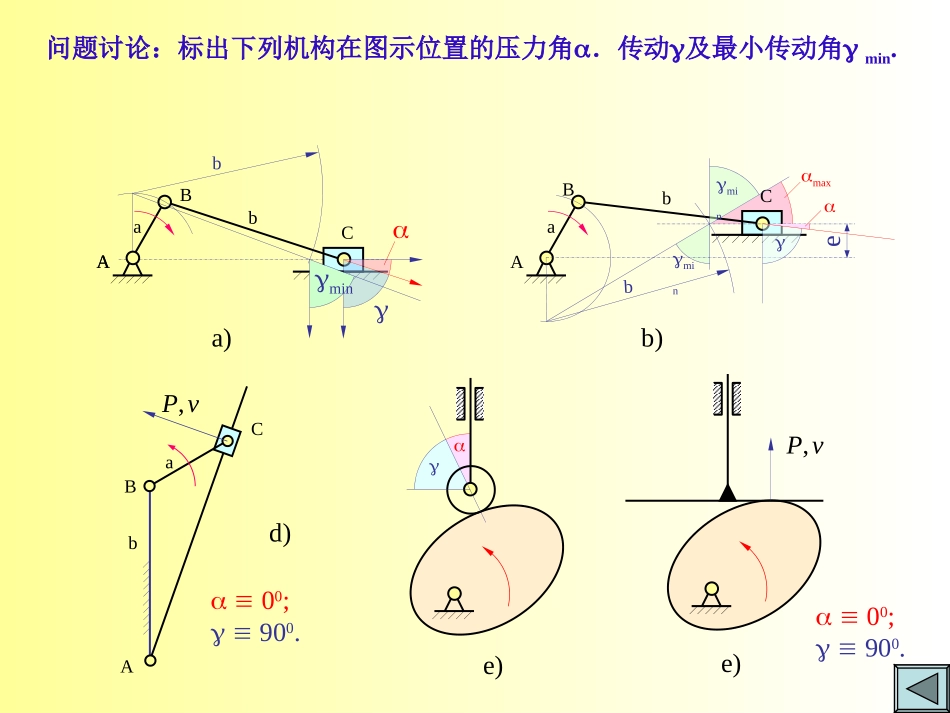
maxminaBbACeb)aBbACa)Abbminmin问题讨论:标出下列机构在图示位置的压力角.传动及最小传动角min
d)aCABbvP,00;900
e)e)vP,00;900
铰链四杆机构的运动连续性1)
运动连续性——当主动件连续运动时,从动件能否连续实现给定的各个位置的运动
可行域——当曲柄AB连续转动时,摇杆CD的摆动范围或3)
不可行域——由δ和δ'所决定的范围可行域可行域不可行域不可行域可行域可行域不可行域不可行域运动不连续问题有:错位不连续错序不连续4)
错位不连续——不连通的两个可行域内的运动不连续
1C234ABD11C2CC1C2C2铰链四杆机构装配模式C4C3φC″ADBφB1C1C2ADC′B2B不连通域5)
错序不连续——原动件按同一方向连续转动时,连杆不能按顺序通过给定的各个位置1C2234AB3DC1C3B1B2图中,要求连杆依次占据B1C1、B2C2、B3C3,当AB沿逆时针逆时针转动可以满足要求,但沿顺时针顺时针转动,则不能满足连杆预期