第十二章 简单机械 第 1 节 杠杆学习目标4 .能对杠杆进行分类,并能根据实际选择合适的杠杆
1 .认识杠杆,并能准确找出支点、动力、阻力、动力臂、阻力臂
( 重点 )2 .能从常见的工具和简单机械中识别出杠杆
( 难点 )3 .通过探究,掌握杠杆的平衡条件,并能利用杠杆平衡条件进行相关计算
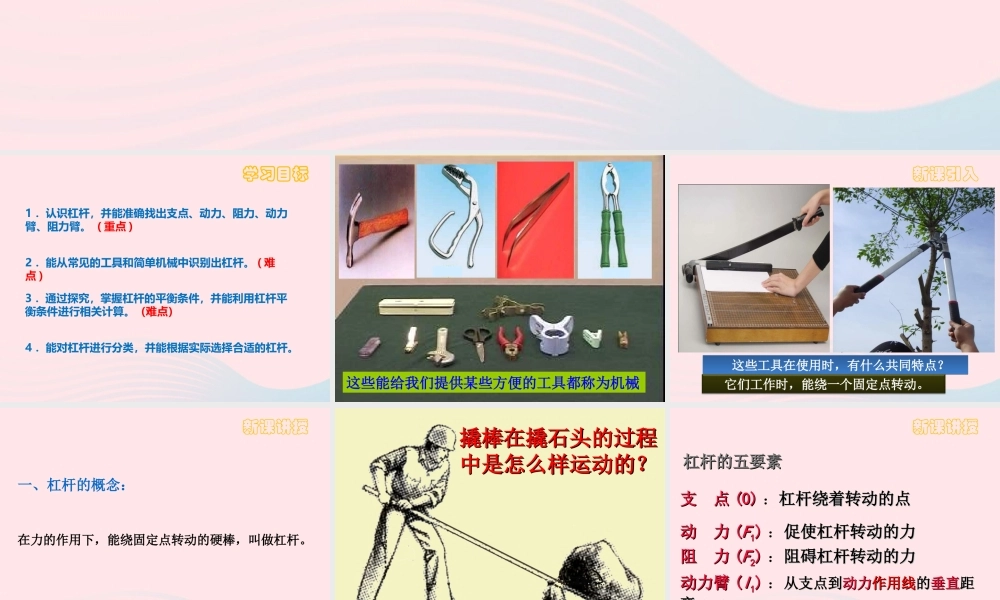
(难点)新课引入这些能给我们提供某些方便的工具都称为机械新课引入 这些工具在使用时,有什么共同特点
这些工具在使用时,有什么共同特点
它们工作时,能绕一个固定点转动
新课讲授在力的作用下,能绕固定点转动的硬棒,叫做杠杆
一、杠杆的概念:新课讲授撬棒在撬石头的过程撬棒在撬石头的过程中是怎么样运动的
中是怎么样运动的
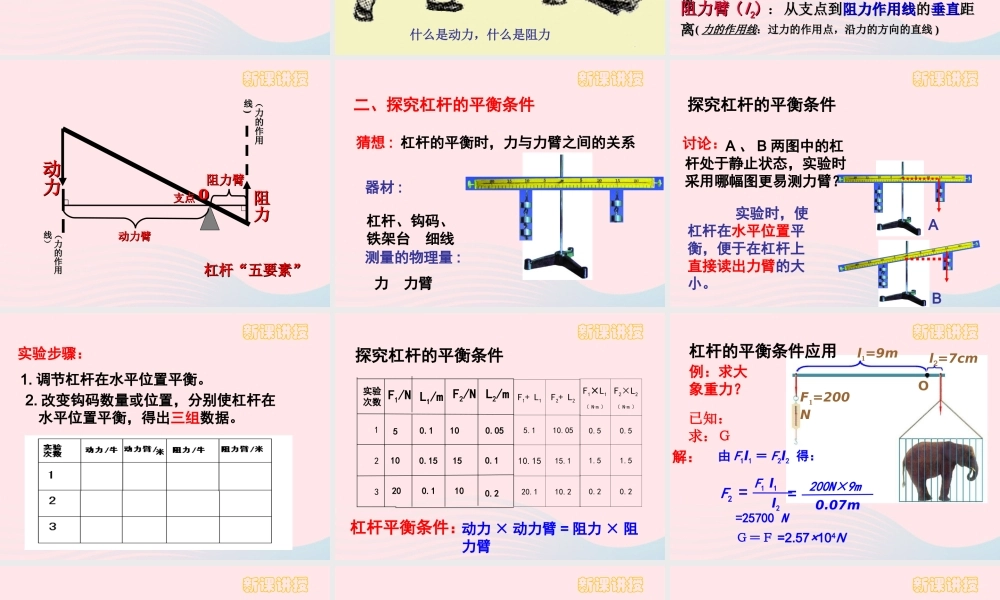
什么是动力,什么是阻力新课讲授支 点支 点 (0)(0) :杠杆绕着转动的点杠杆绕着转动的点动 力动 力 ((FF11)) :促使杠杆转动的力促使杠杆转动的力阻 力阻 力 ((FF22)) :阻碍杠杆转动的力阻碍杠杆转动的力动力臂动力臂 ((ll11)) :从支点到从支点到动力动力作用线作用线的的垂直垂直距距离离阻力臂阻力臂 ((ll22)) :从支点到从支点到阻力作用线阻力作用线的的垂直垂直距距离离(( 力的作用线力的作用线:过力的作用点,沿力的方向的直线:过力的作用点,沿力的方向的直线 ))杠杆的五要素杠杆的五要素新课讲授((力的作用力的作用线线))动力臂动力臂阻力臂阻力臂动力动力阻力阻力(力的作用(力的作用线线))oo支点支点杠杆“五要素”杠杆“五要素”新课讲授二、探究杠杆的平衡条件猜想 : 杠杆的平衡时,力与力臂之间的关系器材 :测量的物理量 :力 力臂杠杆、钩码、铁架台 细线新课讲授AB探究杠杆的平衡条件 A 、 B 两图中的杠杆处于静止状态,实验时采用哪幅图更易测力臂
讨论: 实验时,使杠杆在水平位置平衡,便于在杠杆上直接读出力臂的大小
新课讲授实验步骤