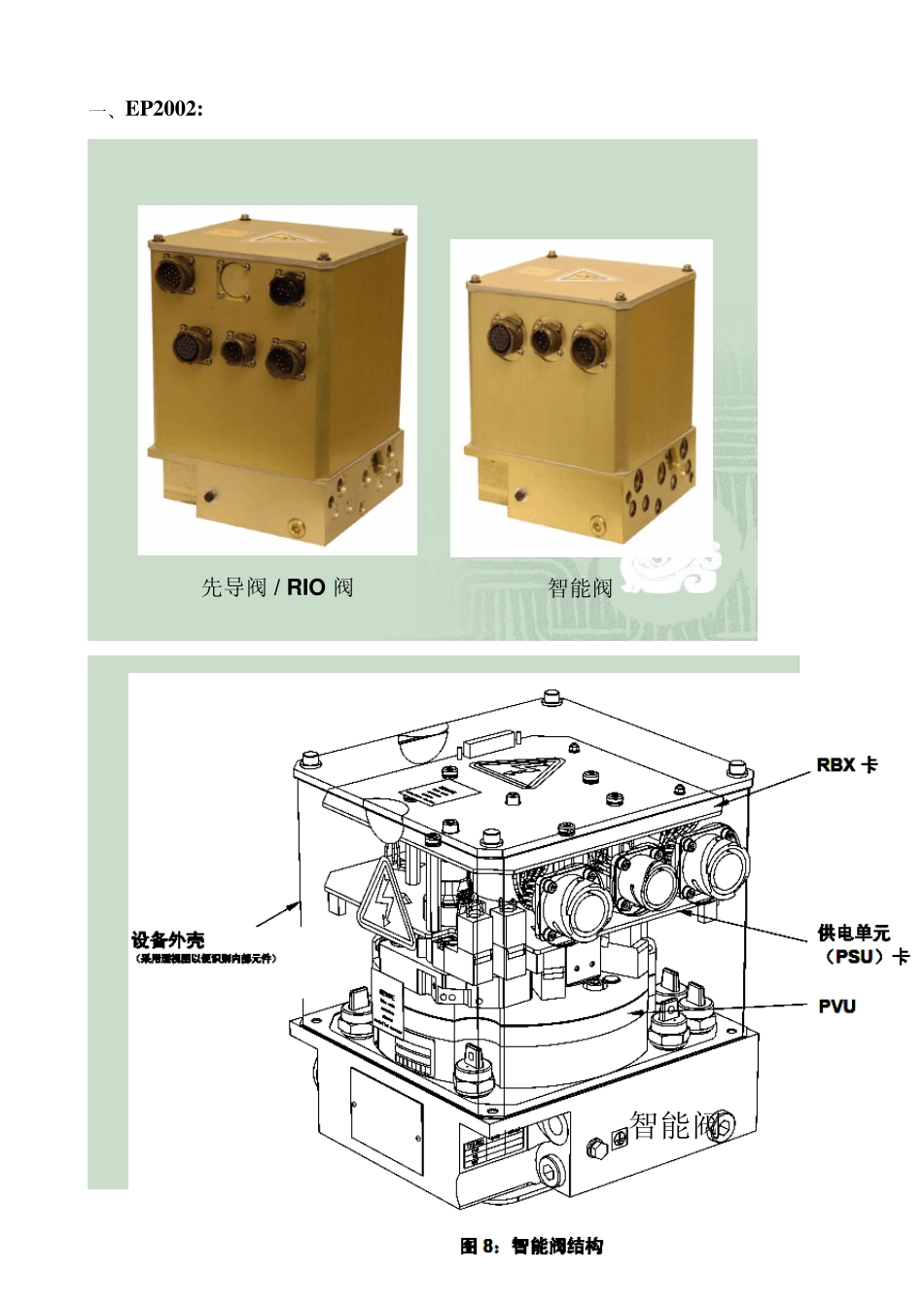
一、EP2002: 先导阀 / RIO 阀智能阀 智能阀 智能阀EP2002 智能阀是一个“机电”装置,其中包括一个电子控制段,该电子控制段直接装在一个称为气动阀单元PVU)的气动伺服阀上
起控制作用的EP2002 先导阀通过CAN 制动总线传达制动要求,每个阀门据此控制着各自转向架上制动调节器内的制动缸压力(BCP)
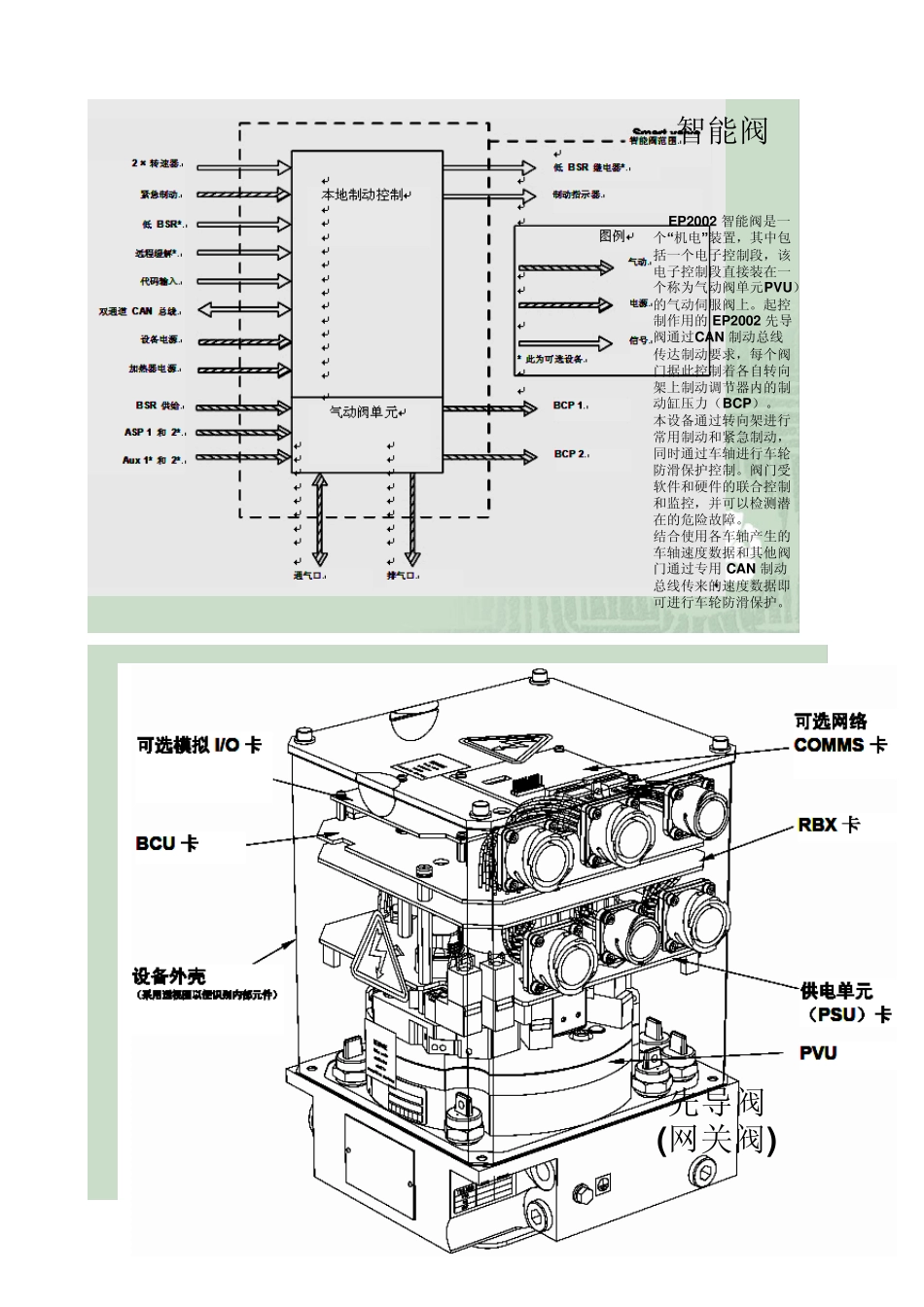
本设备通过转向架进行常用制动和紧急制动,同时通过车轴进行车轮防滑保护控制
阀门受软件和硬件的联合控制和监控,并可以检测潜在的危险故障
结合使用各车轴产生的车轴速度数据和其他阀门通过专用 CAN 制动总线传来的速度数据即可进行车轮防滑保护
先导阀(网关阀) 先导阀(网关阀)EP2002 先导阀执行EP2002 智能阀的所有功能,并将常用制动压力要求分配至所有装在本地CAN 网络中的EP2002 阀门
先导阀也可以提供EP2002 控制系统与列车控制系统的连接
EP2002 先导阀可以按要求定制,以连接MVB、LON、FIP 和 RS485通信网络以及/或者传统列车线缆和模拟信号系统
在EP2002 系统中,一个 EP2002 先导阀中的制动要求分配功能可以将SB 制动力要求分配至列车装有的所有制动系统,以达到司机/ATO 要求的制动力
气动阀单元内部气路图(PVU) 内部气动示意图1 初级调节器 继动阀负责调节装置的供风压力并将其降低至一个按负荷增减的紧急制动压力的水平
继动阀同时还负责在电子负荷系统出现故障时提供机械系统产生的最小紧急制动压力
2 次级调节器 次级调节器位于主调节器上游,负责将供给制动缸的压力限定在最大紧急制动压力
3 负荷单元 负荷单元用于向主调节器继动阀提供一个按负荷增减的紧急制动控制压力
此控制功能一直保持激活状态并与空气悬挂系统压力成一定比例
4 BCP 调节 BCP 调节功能负责从主调节器处接收输出压力并进一步将其调节至常