仿人智能控制 仿人智能控制是仿效人的政行为而进行控制和决策,即在宏观结构上和功能上对人的控制进行模拟
开展仿人智能控制的研究,是目前智能控制的一个重要研究方向
仿人智能控制的原理 1
1 仿人智能控制的基本思想 传统的PID 控制是一种反馈控制,存在着按偏差的比例、积分和微分三种控制作用
比例:偏差一产生,控制器就有控制作用,使被控量想偏差减小的方向 器控制作用的强弱取决于比例系数Kp 变化,积分:它能对偏差进行记忆并积分,有利于消除静差,但作用太强,既会是控制的动态性能变差,以至使系统不稳定
Ti太大微分:能敏感出偏差的变化趋势, To 大可加快系统响应(使超调减小),使系统抑制干扰的能力降低
但又会下面来分析一下 PID 控制中的三种控制作用的是指以及他们的功能与人的控制思维的某种智能差异,从而看出控制规律的智能化发展趋势
1) 比例;PID 中实质是一种线性放大或缩小的作用,它类似于人的想象能力,可以把一个量想得大一些或小一些,但人的想象力是非线性的是变的,可根据情况灵活变化
2) 积分作用:对偏差信号的记忆功能(积分), 人脑的记忆功能是人类的一种基本智能,人脑的记忆是具有某种选择性的
可以记住有用的信息,而遗忘无用或长时间的信息,而PID 中的积分是不加选择的长期记忆,其中包括对控制不利的信息, 同比PID 中不加选择的积分作用缺乏智能性
3) 微分:体现了信号的变化趋势,这种作用类似于人的预见性,但PID 中的微分的预见性缺乏人的远见卓识,且对变化快的信号敏感,对变化慢的信号预见性差 仿人智能控制的基本思想是指:在控制过程中利用计算机模拟人的控制行为能力,最大限度的识别和利用控制系统动态过程所提供的特征信息进行启发和直觉推理,从而实现对缺乏精确数学模型的对象进行有效的控制 1
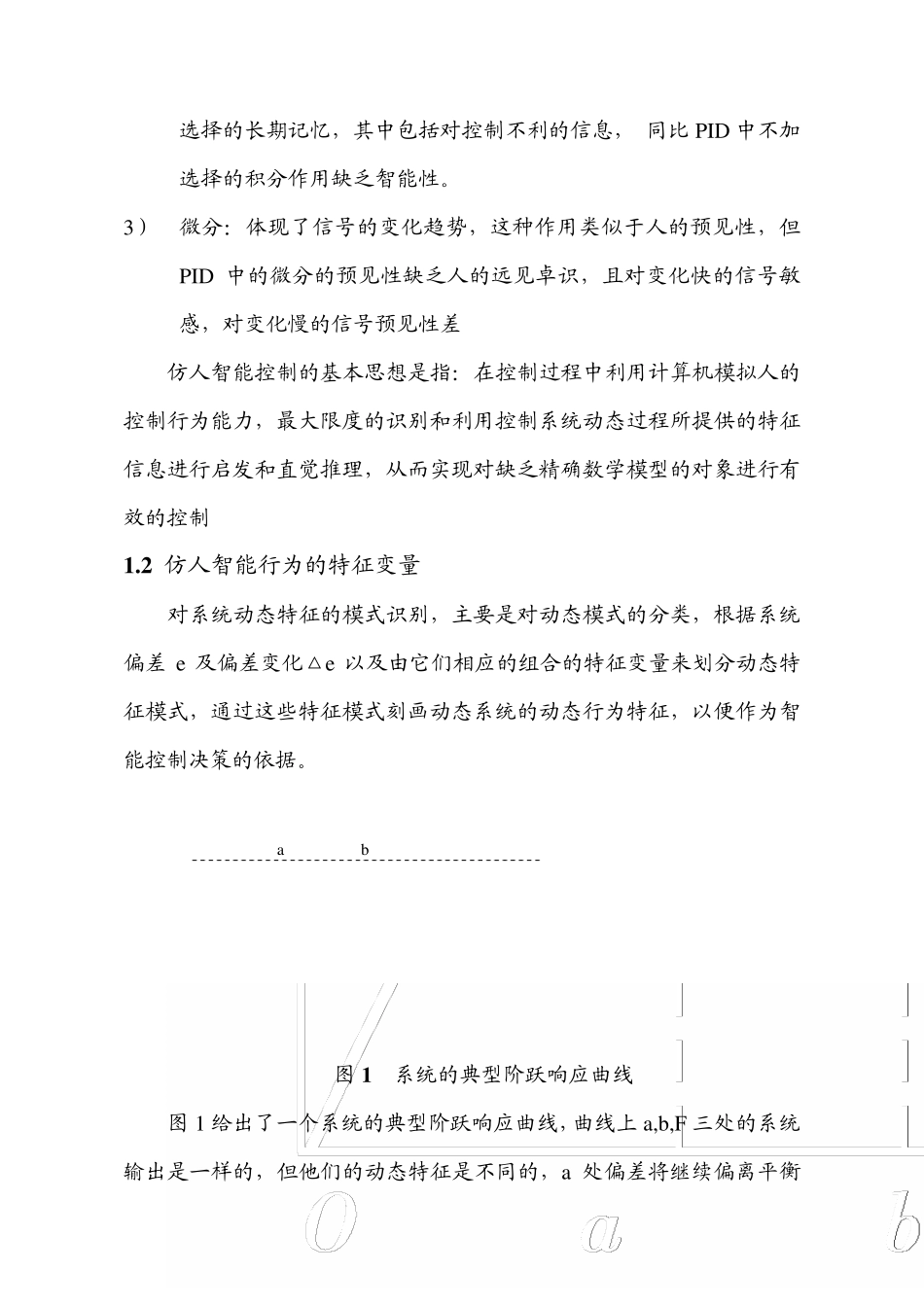
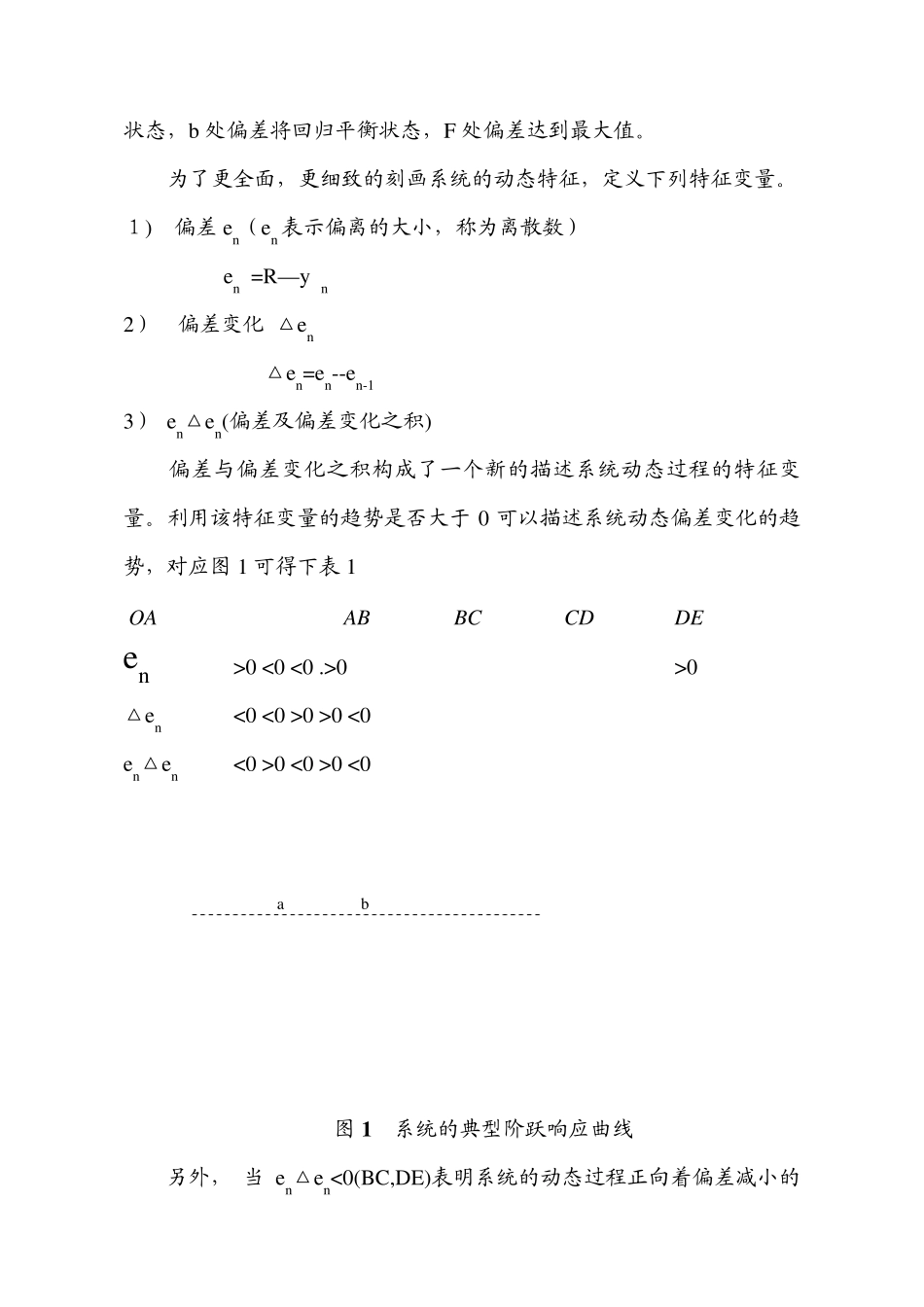
2 仿人智能行为的特征变量 对系统动态特征的模式识别,主要