外文资料翻译译文马铃薯播种机的性能评估大多数马铃薯播种机都是通过勺型输送链对马铃薯种子进行输送和投放
当种植精度只停留在一个可接受水平的时候这个过程的容量就相当低
主要的限制因素是:输送带的速度以及取薯勺的数量和位置
假设出现种植距离的偏差是因为偏离了统一的种植距离,这主要原因是升运链式马铃薯播种机的构造造成的
一个理论的模型被建立来确定均匀安置的马铃薯的原始偏差,这个模型计算出两个连续的马铃薯触地的时间间隔
当谈到模型的结论时,提出了两种假设,一种假设和链条速度有关,另一种假设和马铃薯的形状有关
为了验证这两种假设,特地在实验室安装了一个种植机,同时安装一个高速摄像机来测量两个连续的马铃薯在到达土壤表层时的时间间隔以及马铃薯的运动方式
结果显示:(a)输送带的速度越大,播撒的马铃薯越均匀;(b)筛选后的马铃薯形状并不能提高播种精度
主要的改进措施是减少导种管底部的开放时间,改进取薯杯的设计以及其相对于导种管的位置
这将允许杯带在保持较高的播种精度的同时有较大的速度变化空间
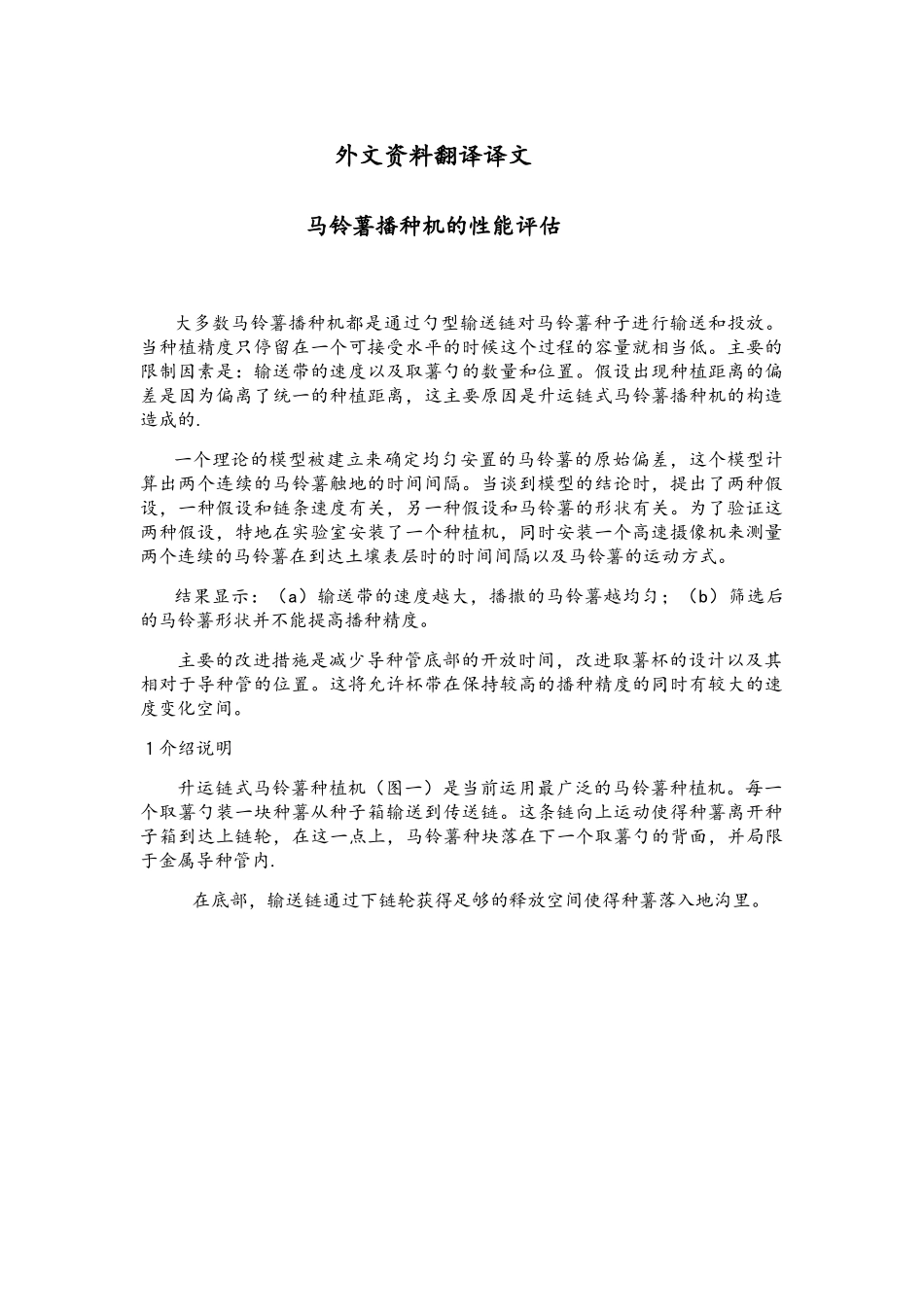
1介绍说明升运链式马铃薯种植机(图一)是当前运用最广泛的马铃薯种植机
每一个取薯勺装一块种薯从种子箱输送到传送链
这条链向上运动使得种薯离开种子箱到达上链轮,在这一点上,马铃薯种块落在下一个取薯勺的背面,并局限于金属导种管内
在底部,输送链通过下链轮获得足够的释放空间使得种薯落入地沟里
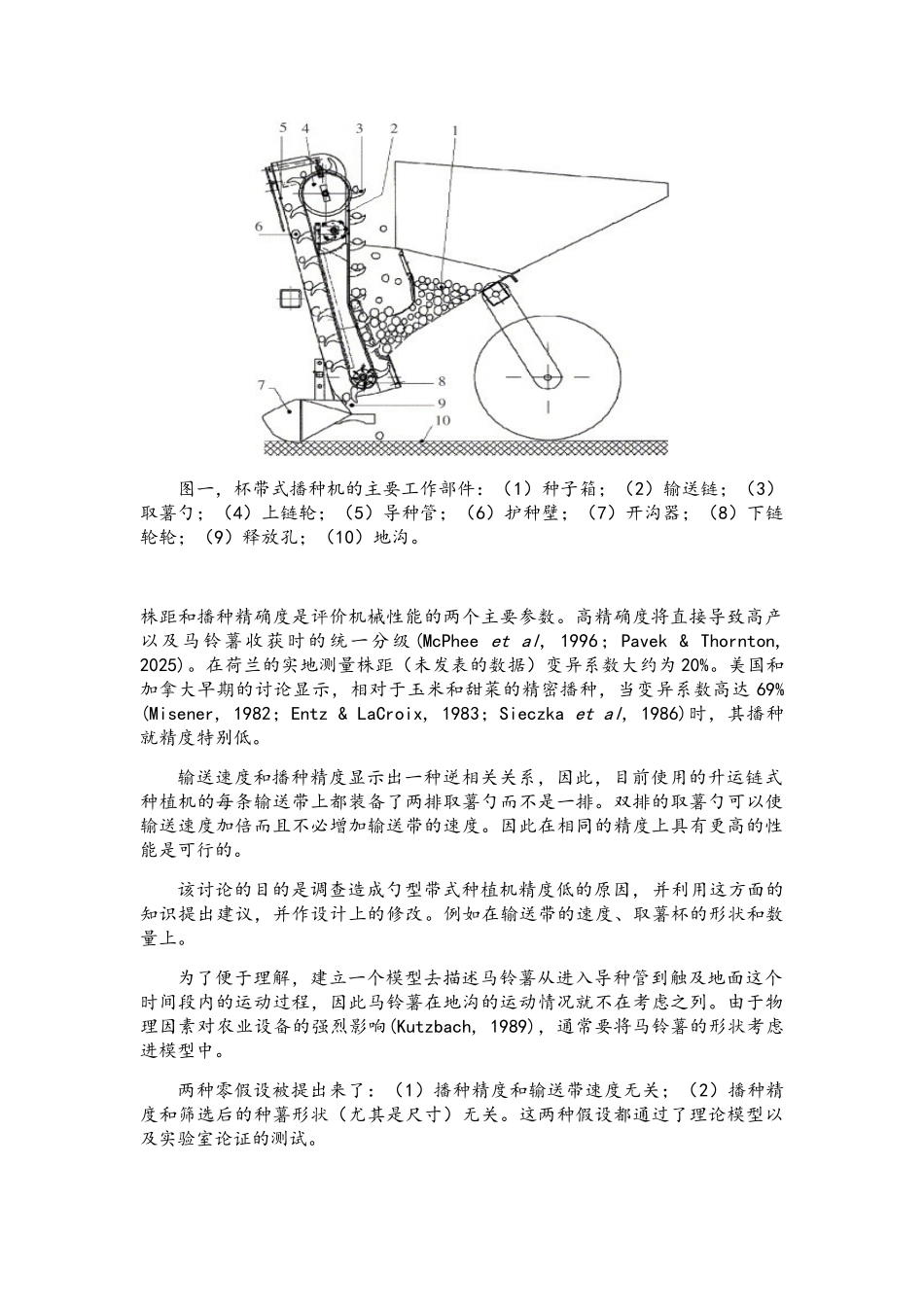
图一,杯带式播种机的主要工作部件:(1)种子箱;(2)输送链;(3)取薯勺;(4)上链轮;(5)导种管;(6)护种壁;(7)开沟器;(8)下链轮轮;(9)释放孔;(10)地沟
株距和播种精确度是评价机械性能的两个主要参数
高精确度将直接导致高产以及马铃薯收获时的统一分级 (McPhee et al, 1996;Pavek & Thornton, 2025)
在荷兰的实地测量株距(未发表的数据)变异系数大约为 20%