基于单片机控制的异步电动机变频调速系统的设计摘要本文以三相交流调速系统为基础,进行了三相异步电动机变频调速的系统设计
首先,通过使用MATLAB/SIMULINK软件进行交-直-交变频调速系统模型的搭建与仿真,得出了异步电动机在正弦脉冲宽度调制(SPWM)技术下调速的结果
其次,根据所搭建的系统模型,在PROTUSE软件中设计出基于51单片机控制的SPWM变频调速系统,编制相应的软件程序并进行调试和仿真,得出了不同频率下SPWM的调制波形
最后,通过比较两种不同调速系统的仿真结果,证明了基于51单片机控制的异步电机变频调速PWM调制方法的正确性和可行性
关键字:异步电动机;变频调速;SPWM;MATLAB/SIMULINK;单片机1概述直流电气传动和交流电气传动在19世纪先后诞生,鉴于直流传动具有优越的性能,高性能可调速传动大都采用直流电机,交流调速系统的多种方案虽然早已问世,并已获得实际应用,但其性能却无法与直流调速系统相匹敌
直到20世纪70年代末,由于电力电子技术尤其是大功率晶闸管(可控硅)变流技术的发展,研制出了体积小、重量轻、功率大、效率高的静止变流装置,实现了采用电力电子变流器的交流传动系统,为三相异步电动机大范围的平滑调速调节开辟了新的技术途径,才使三相异步电动机在铁路牵引中的应用得到关键性突破,从而得到极为迅速的发展
大规模集成电路和计算机控制的出现,更使高性能的交流调速系统得到发展
中国和谐号动车组使用三相鼠笼型异步电动机作为牵引动力,它要求列车运行安全、快速、稳定,因此对牵引电动机的平滑调速和自动控制非常重要,异步电动机结合电力电子技术和微机控制技术可以实现这一要求
1交流调速系统异步电动机的调速方法早已为人们所熟知,基本上可以分为变极对数调速、变频调速、变转差率调速三类
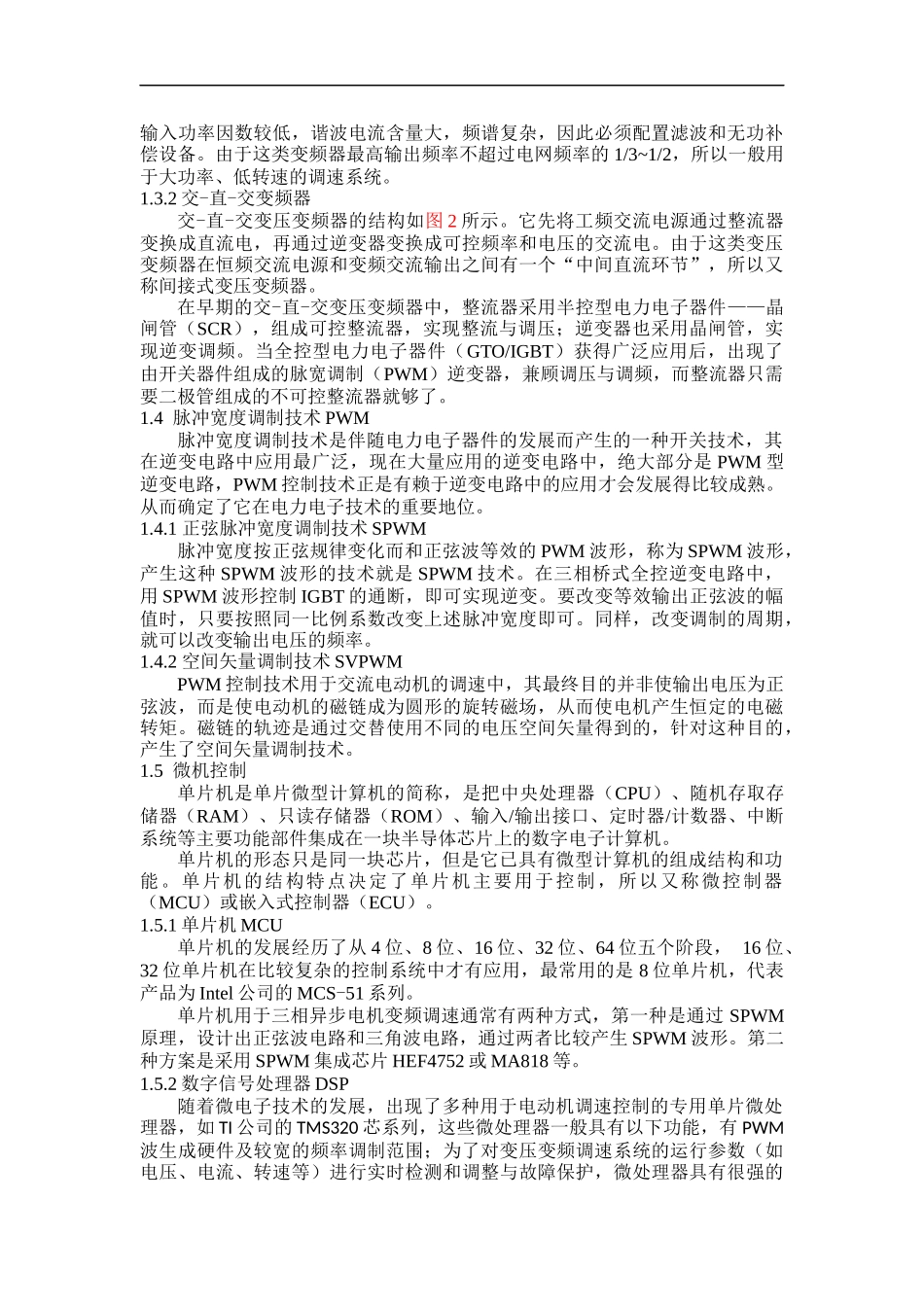
这从下面的异步电动机的转速公式可以明显看出
n=(1−s)ns=(1−s)60